로봇 모델 만들기~ rviz 와 gazebo
로봇 모델을 만들어 보았다~ 각 link와 joint 가 구성이 되는 것을 배웠다~
로봇 모델 만들기
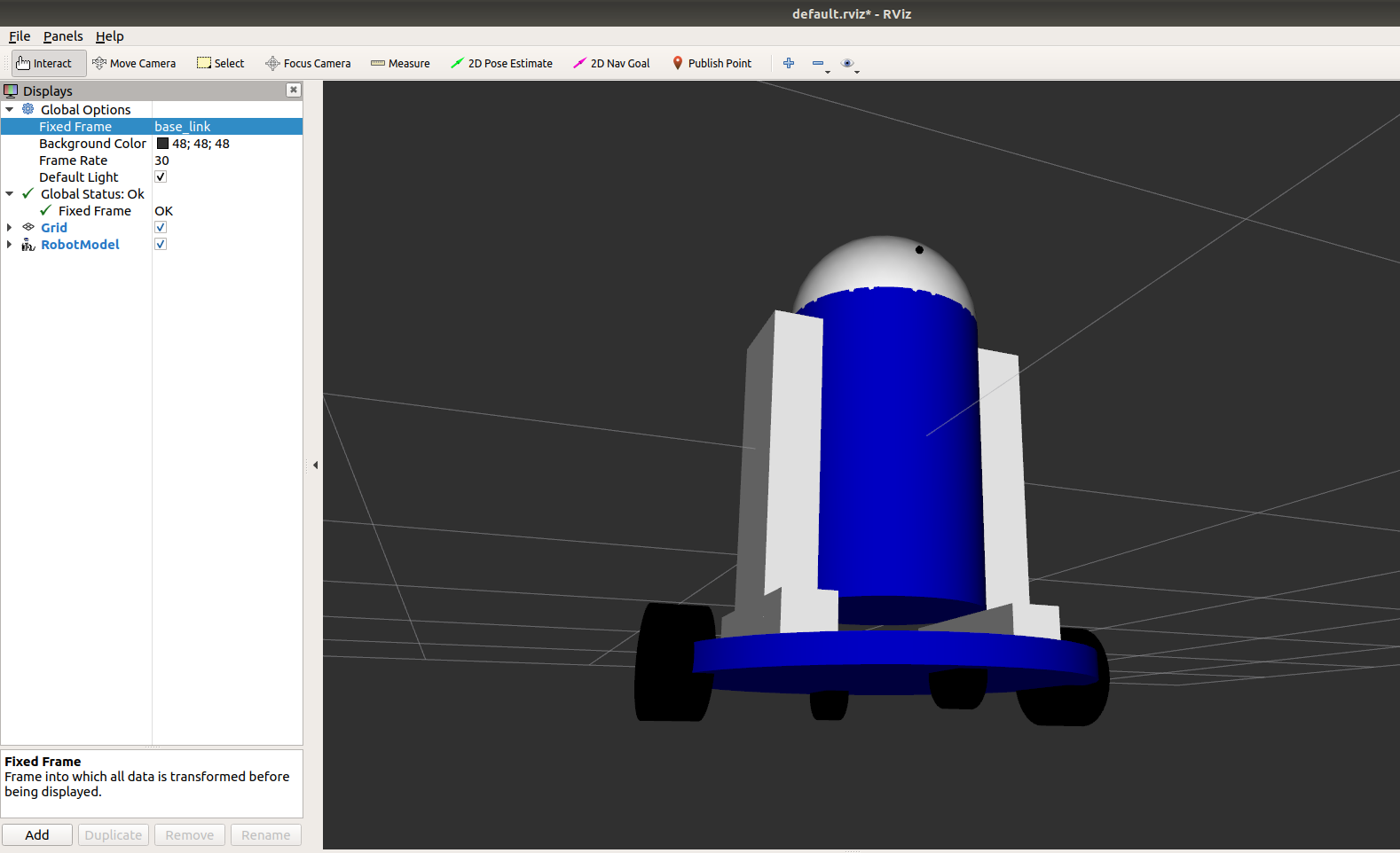
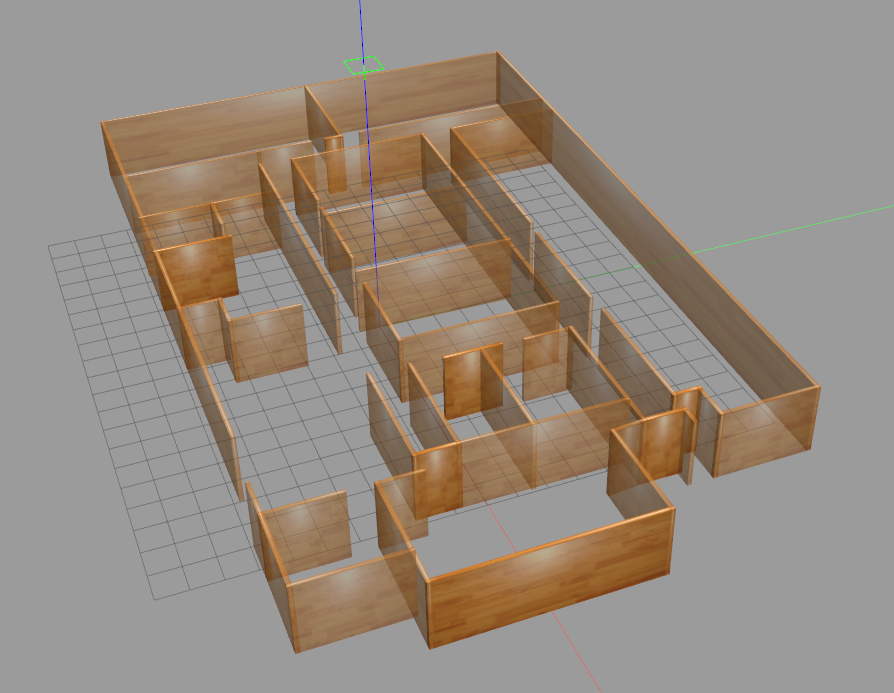
Gazebo 에서 만들었던 building model 에 로봇 모델을 쓰기 위해서 rviz를 이용해서 로봇 모델을 만들었다.
xml을 사용해서 하는데 예전에도 xml이 궁금하기는 했고 들어보기도 했으나
이번에 처음 접해 보았다~
서버 사이드와 프론트에서는 JSON을 이용해서 통신을 하는데 XML은 이제 잘 쓰이지 않는다고
들었는데~
로봇에서는 XML만 쓰이는 것은 아니겠지만 이것도 좀 궁금했다.
질문 한다는 것을 깜빡 ㅋㅋ
어쨌든 urdf 라는 것으로 사용이 되는데
이 안에 link 태그들이 있고 그리고 이 link들을 joint 태그로 연결해준다
joint를 해줄 때 부모 parent link, 자식 child link 가 생기게 되게
그 두 개를 joint에서 잘 연결 시켜주면 되는데
막상 이해를 했던 것 같아서 실행을 하면 생각했던 거와 다르게 되어서 이 부분이 많이 헛깔렸다
이게 어떻게 보면 세세한 수치에도 많이 바뀌고, local origin 좌표와도 신경을 써야하고 xyz축
roll, pitch, yaw 도 있었다
참고 사이트: https://www.grc.nasa.gov/www/k-12/airplane/rotations.html
다행인 것은 예전에 비행기 시뮬레이터 게임을 한적이 있었는데 비행기에도 roll, pitch, yaw 란 개념이 있어서 이 부분은 이해가 쉽게 갔다. 이미지를 찾는데 roll, pitch로 검색하니 역시 비행기가 따악!
차근차근 무작정 따라 해보기
그래서 좀 더 제대로 해보기 위해서 무작정 하는 것보다는 튜토리얼을 하나씩 해보기로 결정
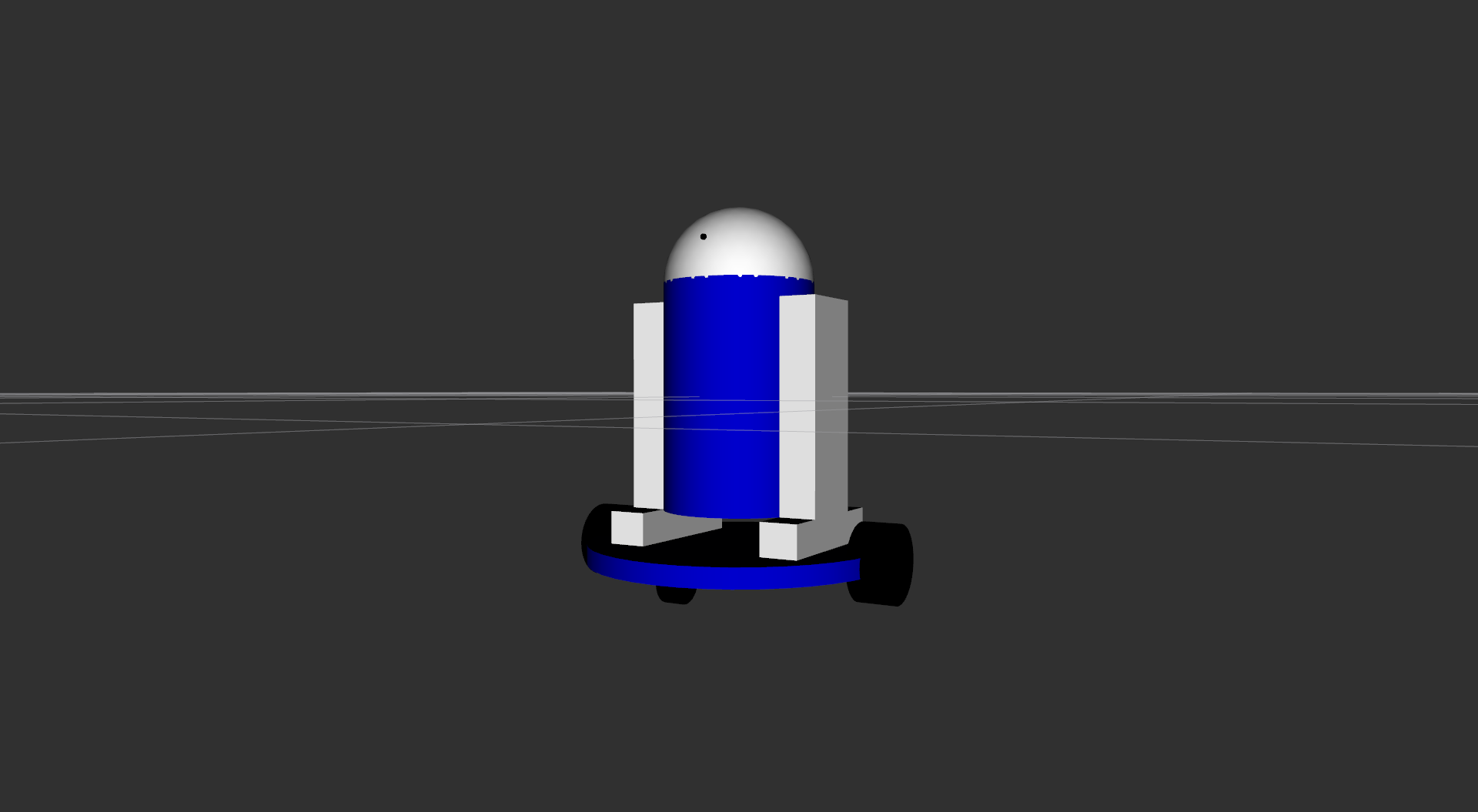
공식 페이지 였던 거 같은데 스타워즈 R2-D2 만들기가 있어서 하나씩 해보면서 해보았더니~ 나만의 모델이 완성이 되었다 ㅋㅋ
물론 복사 붙여넣기 한 것은 아니였고 처음부터 link를 하나씩 써가면서 두 개의 링크를 joint를 했더니 도움이 많이 되었다
아래는 내가 사용한 코드 예제
<?xml version="1.0" ?>
<robot name="firstmodel">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyx="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 -0.05"/>
</joint>material 태그로 색을 미리 지정해줘서 각 link에서 쉽게 사용할 수 있게 해준다
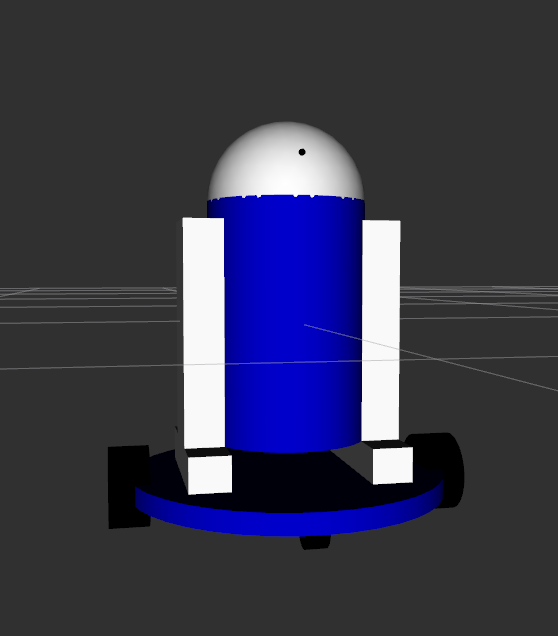
base_link인 몸통은 cylinder로 만들고 right_leg는 joint base_to_right_leg로 연결이 되어 진다
몸통의 크기는 0.2 인데 오른쪽 다리가 origin좌표는 rpy에서 p 즉 pitch 부분이 90도 세워져있게 만들었고
(1.57075 는 완전 한바퀴를 도는 3.14의 절반)
그리고 joint에서 붙는 부분이 중요한데 xyz에서 y축으로 -0.22 이동해서 오른쪽으로 이동이 되어서 원형 몸통에 다리가 붙는 코드가 완성이 됨
아 그리고 역시 name을 지정할 떄에도 뭔가 link1, link2, joint1 이라고 하기 보다
쉽게 이해할 수 있게 문자열로 줬더니 더 좋았다.
(물론 너무 길어진다는 단점도 있다 ㅋㅋ)
어쨋든.. 그래서 계속 집중해서 하다보니~ 이제 좀 이해가 되었고 어느정도 원하는 로봇 모델을 만들어 볼 수 있었다
물론~ 아주 beginner 이기는 하다 ㅋㅋㅋ 😛 그래도 한 걸음 한 걸음 나아가면 되는 것이지 뭐 ㅋㅋ
아쉽게도 gazebo 시뮬레이터를 실행해서 내가 그 전에 만든 빌딩 (학교건물 4층) 안에 로봇모델을 넣는 것에는 실패했지만 (나름 심혈을 기울인 ㅋㅋ)
교수님께 들은바로는 urdf를 spawn을 이용해서 전환해줘서 launch 파일에서 작동되게하는 힌트를 얻었다
주말을 이용해서 한번 해볼 계획~
아...하하ㅏㅏㅏㅏ하하하 신난다;;😱