Mobile Robot 모바일 로봇 (추가)- Navigation
By
qsp
, Created on 15th Aug 2021
자율주행을 위한 slam 및 navigation
사용 기술
작업환경 및 영상
slam 및 nav 영상
시행착오


링크
ROS로 진행한 Mobile Robot Project 에서 아쉽게도 다 못했던 것이 있었는데 바로 내비게이션이다.
slam으로 지도를 만들고 그 지도를 통해서 내비게이션도 하는 것이였는데,
시간, 인원 모든게 부족했던 것 같다.
그래도 직업학교 훈련이 종료되는 시점까지 최선을 다해보기로 했고 (다들 집에 가기 바빴지만ㅜㅜ)
어설프고 부족하지만 그래도 내비게이션까지 해 볼 수 있었다.
자율주행을 위한 slam 및 navigation
gazebo를 이용한 시뮬레이션은 해보았지만 내비게이션을 하기에는 시간이 조금 부족했다
결국 최종 발표에서는 navigation은 포함을 못시켰지만 직업학교의 종강까지는 시간이 며칠 남아 있었다.
그래서 나름 포기하지 않고 계속 네비게이션 관련해서 진행을 했고
미흡한 점이 있지만 최대한 노력을 했기에 결과물을 영상으로 제작해서 올리게 되었다.
사용 기술
- SLAM
- realsense2_camera : Intel L515, T265 센서 작동
- rviz : 시각화
- rtabmap : slam
- Navigation
- move_base
- pointcloud_to_laserscan : 3D pointcloud 에서 2D laserscan 변환
- map_server
- AMCL: 2D로 localization 제공 Particle filter을 이용 adaptive Monte Carlo Localization approach
작업환경 및 영상
환경: 직업학교 강의실에 책상으로 파티션을 만들어서 진행
SLAM을 한 후 생성된 rtabmap.db 파일을 이용해서 2D 지도를 만들어서 사용
2D map 생성
#각기 다른 터미널 사용
rosrun rtabmap_ros rtabmap _database_path:=~/.ros/rtabmap.db
rosrun map_server map_saver map:=/grid_map
rosservice call /publish_map 1 1 0Navigation 은 localization:=true 값으로 설정하면 네비게이션 관련 프로그램이 실행되게 함
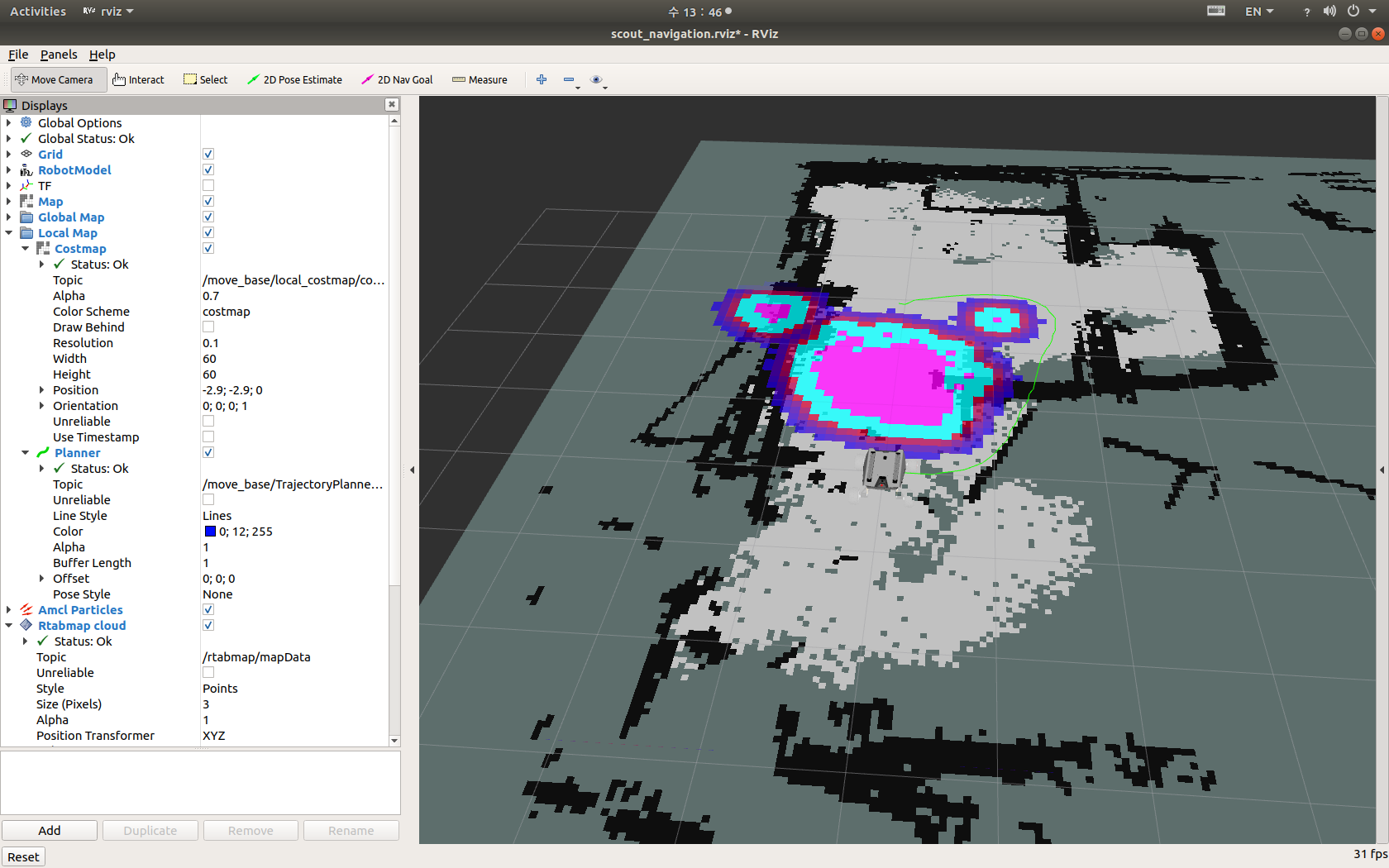
slam 및 nav 영상
시행착오
장애물 인식을 제대로 안되고 바로 앞의 빈 공간에서도 장애물로 인식해서 진행이 잘 안되었는데
센서 고정이 확실하게 안되어서 발생한 문제
미세한 각도 차이로 바닥을 탐지하게 됨
문제 사진 - 스크린샷
라이다 센서가 조금 앞으로 기울어져 있는 모습
문제해결 - 각도를 조정 후 고정
링크
- 모바일 로봇 프로젝트
mobile robot project 보기 - 깃허브
프로젝트 깃허브 보기