ROS turtlesim 튜토리얼~ ros에서 터틀심을 켜보자~
이번에는 turtlesim 기본 튜토리얼과 추가로 topic 통신 분석하는 방법을 포스팅 해보았다~
터틀심 튜토리얼 터틀심 실행해보기
먼저 ROS에서 roscore 명령어로 실행을 해서 master를 실행을 시켜주자~
$ roscore다음은 터틀심 실행하기하기 (터틀심 패키지의 터틀심노드를 실행)
$ rosrun turtlesim turtlesim_node(탭키를 눌러서 하면 더 쉽고 빠르게 할 수 있다)
그러면 그래픽 화면이 창이 뜨면서 거북이 보인다~ ROS의 마스코트?
새로 실행할 때 마다 거북이가 바뀐다 ㅋㅋ
이번에는 키보드로 조작을 하기 위해서 다른 노드를 또 실행해준다 아래처럼 입력하자
$ rosrun turtlesim turtle_teleop_key 이제 키보드로 조종하는데로 거북이가 움직이게 된다
Reading from keyboard
---------------------------
Use arrow keys to move the turtle. 'q' to quit.빠져나오려면 q를 눌러주고 키보드로 입력을 하면 된다
이제 어떤 topic 통신인지 확인해보자
rostopic을 이용해서 확인해보자
rostopic list 아래의 결과가 나온다
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose여기에서 원하는 것은 /turtle1/cmd_vel 토픽이 보인다. 추가로 info까지 봐보자
$ rostopic info /turtle1/cmd_vel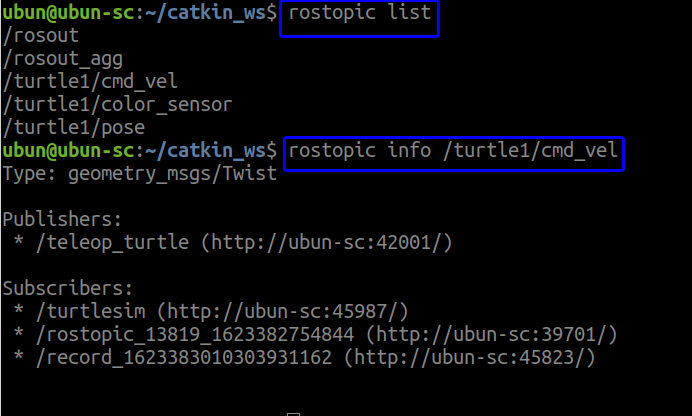 처럼 나오는데
처럼 나오는데
geometry_msgs 패키지를 사용하고 있고 msg는 Twist 디렉토리 안에 있는 것을 알 수 있고
터미널에 roscd geometry 라고 입력하면 패키지 디렉토리로 한번에 이동할 수 있다
Publishers는
/teleop_turtle 노드이고 (키보드 조작을 했던 )
Subscribers에는
/turtlesim 노드가 있는 것을 알 수 있다
추가로 rosbag을 이용해서 저장하기
ROS에서 bag의 의미는 저장하는 것과 관련이 있는데 이를 이용해보자
터틀심 turtle_teleop_key가 노드가 작동되고 있을 때
다른 터미널을 열고 위의 topic을 이용해서 저장해보자 (rostopic list 로 알 수 있다. 또는 탭키를 활용하자!)
rosbag record /turtle1/cmd_velbag record /turtle1/cmd_vel
[ INFO] [1623383299.544184296]: Subscribing to /turtle1/cmd_vel
[ INFO] [1623383299.546579495]: Recording to '2021-06-11-12-48-19.bag'.저장을 시작했다고 나오고 파일명이 나온다
이제는 조작을 해주기 위해서 다시 turtle_teleop_key 가 실행되고 있는 터미널에서 조작을 해주자 이리저리 움직이면 값들을 저장한다.
rosbag 으로 저장되고 있는 터미널로 이동해서 어느정도 조작이 되면 ctrl+c를 눌러서 빠져나오자
이제 bag에 저장된 것으로 실행을 시켜볼 수가 있는데,
play를 해서 위에 나오는 '파일명.bag' 으로 다시 실행을 시켜줄 수 있다
(복사를 해서 사용하자~ )
터미널에서 복사는 ctrl+shift+c, 붙여넣기는 ctrl+shift+v
아래처럼 입력해보자
$ rosbag play 2021-06-11-12-44-44.bag이제 거북이 저장된 데이터를 토대로 다시 움직이기 시작한다~