maze_action 미로탈출 프로젝트
ROS2의 action server와 action client를 이용해서
실제 turtlebot3 로봇과 가상 시뮬레이션 gazebo에서 구현
ROS2 Maze Action 프로젝트
ROS2의 Action Server / Client를 이용해서 maze_action_server/client 노드를 실행하여
로봇이 미로를 탈출하는 패키지 프로젝트 입니다
Maze Action
Maze Action 프로젝트는
- ROS2의 action을 이용해서 goal, feedback, result로 수행
- maze_action_client 노드에서 로봇에 방향 설정 명령을 Goal로 maze_action_server로 보냄
- maze_action_server 에서는 로봇을 움직일 수 있게 토픽을 발행하며 중간 중간 feedback을 함
- 최적으로 result로 응답을 해서 로봇의 탈출 여부를 알 수 있게 됩니다.
로봇은 turtlebot3 burger를 사용해서 실제 미로와 비슷하게 환경을 만들어서 수행하였습니다.
 [미로를 책으로 설정, 로봇 turtlebot3]
[미로를 책으로 설정, 로봇 turtlebot3]
환경
필요한 패키지
(turtlebot3를 직접 사용하는 경우에 라즈베리파이에 설치합니다.)
maze_action 의 패키지 설명
- maze
maze_action_server, maze_action_client로 ROS2 action으로 로봇 구동 - maze_dolly gazebo로 customized_dolly 로봇으로 시뮬레이션
- maze_interfaces
사용자 정의 ROS2 action type
- 패키지 구성 (tree)
maze_cation ├── maze │ ├── CMakeLists.txt │ ├── launch │ │ └── maze_server.launch.py │ ├── package.xml │ └── src │ ├── maze_client.cpp │ └── maze_server.cpp ├── maze_dolly │ ├── CMakeLists.txt │ ├── launch │ │ └── maze_dolly.launch.py │ ├── models │ │ ├── customized_dolly │ │ └── wall_maze │ └── worlds │ └── maze_dolly.world └── maze_interfaces ├── action │ └── Maze.action ├── CMakeLists.txt └── package.xml
turtlebot3 로봇 사용
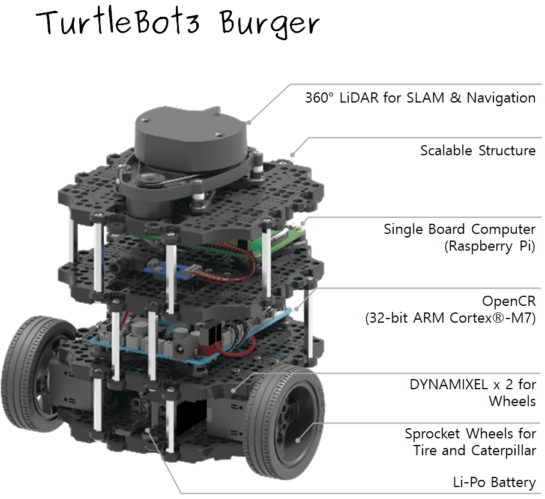
- 로보티즈의 turtlebot3 burger 사용
 [출처: 로보티즈]
[출처: 로보티즈]
하드웨어 스펙 (일부)
| Items | Model |
|---|---|
| IMU | Gyroscope 3 Axis, Accelerometer 3 Axis |
| MCU | 32-bit ARM Cortex®-M7 with FPU |
| SBC | Raspberry Pi 4b |
| LDS | 360 Laser Distance Sensor LDS-02 |
| Actuator | XL430-W250 |
 [출처: 로보티즈]
[출처: 로보티즈]
소프트웨어
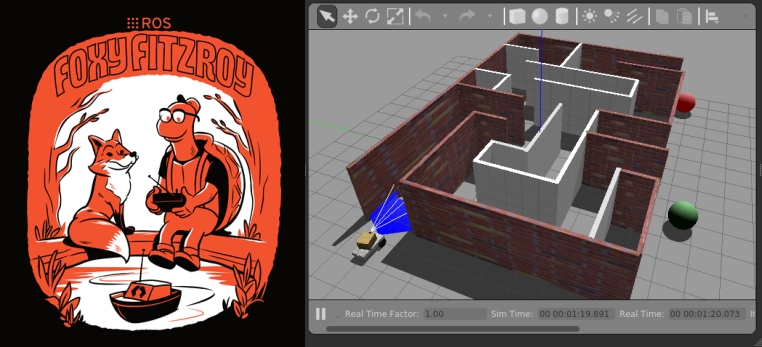
ROS2 ; Foxy Fitzroy
Gazebo : ROS의 시뮬레이션 프로그램으로 실제 로봇없이 가상에서 시뮬레이션으로 구동이 가능
시뮬레이션으로 진행 할 시 gazebo 및 런치파일 실행
시뮬레이션으로 gazebo에서 실행할려고 할 때에는 maze_dolly 패키지의 런치파일로
실행합니다.
설치 방법 및 코드
깃허브에서 클론해서 설치를 합니다.
Git hub 및 README를 확인해주세요
설치 방법 및 코드를 깃허브에서 확인할 수 있습니다.
일부 code
코드는 c++로 작성하였습니다.
- maze 패키지의 maze_server.cpp 의 일부 코드
void execute(const std::shared_ptr<GoalHandleMaze> goal_handle) { rclcpp::WallRate loop_rate(5); const auto goal = goal_handle->get_goal(); // auto feedback = std::make_shared<maze_interfaces::action::Maze::Feedback>(); auto result = std::make_shared<maze_interfaces::action::Maze::Result>(); // client로 부터 받은 goal에서 turning_sequence 만큼 반복 for (int val : goal->turning_sequence) { RCLCPP_INFO(this->get_logger(), "Current Input: %d", val); RCLCPP_INFO(this->get_logger(), "Turning %s ", direction_str_vec[val].c_str()); // 사용자에게 보여주기 위한 vector 스트링, 일치하는 문자열 프린트 feedback->feedback_msg = "Now.. turning " + direction_str_vec[val]; //client쪽에서 사용 RCLCPP_INFO(this->get_logger(), feedback->feedback_msg); // 사용자 입력과(turning_sequence), direction_flt_vec(벡터: 방향값 수치)와 같은 배열의 value값을 turn_robot 메소드를 호출 turn_robot(direction_flt_vec[val]); // feedback 보냄 goal_handle->publish_feedback(feedback); // cmd_vel로 제어하는 메소드 호출 moving_robot(); } // 이미지 처리를 위해서 auto image_subscriber = std::make_shared<ImageSubscriber>(); // ... // 생략 // ... // image_subscriber에서 처리한 result 값 결정해서 보내주기 if (!is_green) { RCLCPP_ERROR(get_logger(), "====== Failed ======"); result->success = false; goal_handle->abort(result); } else { RCLCPP_INFO(get_logger(), "====== Succeed ======"); result->success = true; goal_handle->succeed(result); } }
- maze 패키지의 maze_client.cpp 의 일부 코드
void send_goal() { using namespace std::placeholders; auto goal_msg = maze_interfaces::action::Maze::Goal(); // 유저에게 입력받은 배열을 받아와서 action msg에 넣어주기 goal_msg.turning_sequence = this->get_turning_list(); auto send_goal_options = rclcpp_action::Client<maze_interfaces::action::Maze>::SendGoalOptions(); send_goal_options.goal_response_callback = std::bind(&MazeActionClient::goal_response_callback, this, _1); send_goal_options.feedback_callback = std::bind(&MazeActionClient::feedback_callback, this, _1, _2); send_goal_options.result_callback = std::bind(&MazeActionClient::result_callback, this, _1); // async_send_goal() auto goal_handle_future = this->action_client->async_send_goal(goal_msg, send_goal_options); } void feedback_callback(rclcpp_action::ClientGoalHandle<maze_interfaces::action::Maze>::SharedPtr, const std::shared_ptr<const maze_interfaces::action::Maze::Feedback> feedback) { // 서버에서 처리된 feedback을 출력 RCLCPP_INFO(this->get_logger(), "Received feedback: %s", feedback->feedback_msg.c_str()); } void result_callback(const rclcpp_action::ClientGoalHandle<maze_interfaces::action::Maze>::WrappedResult & result) { // 최종 result 여부 this->goal_done_ = true; // ... // 생략 // ... // 최종적 결과로 비교 if (result.result->success != false) { RCLCPP_WARN(this->get_logger(), "Congrats! Actions have been accompished!!"); } }
maze-action_server_node 실행 / launch file과 gazebo 실행
- 터틀봇3로 수행시
그리고 maze_action_server 노드 실행cd ~/colcon_ws . install/setup.sh ros2 run maze maze_action_server_node
OR
- 가제보로 실행할 시
gazebo 런치파일 실행
ros2 launch maze_dolly maze_dolly.launch.py
새로 다른 터미널을 열어준 후에 maze_action_server를 실행시키기 위해 런치 파일 실행
ros2 launch maze maze_server.launch.py세 번째, maze_action_client_node 실행하기
- 액션 클라이언트 노드 실행 (공통)
또 새로운 터미널을 열어줍니다. source setup.sh을 해줘서 overlay 상태를 만들자source install/setup.sh
이번에는 maze_action_client 노드 실행함
ros2 run maze maze_action_client_node
노드 실행한 모습
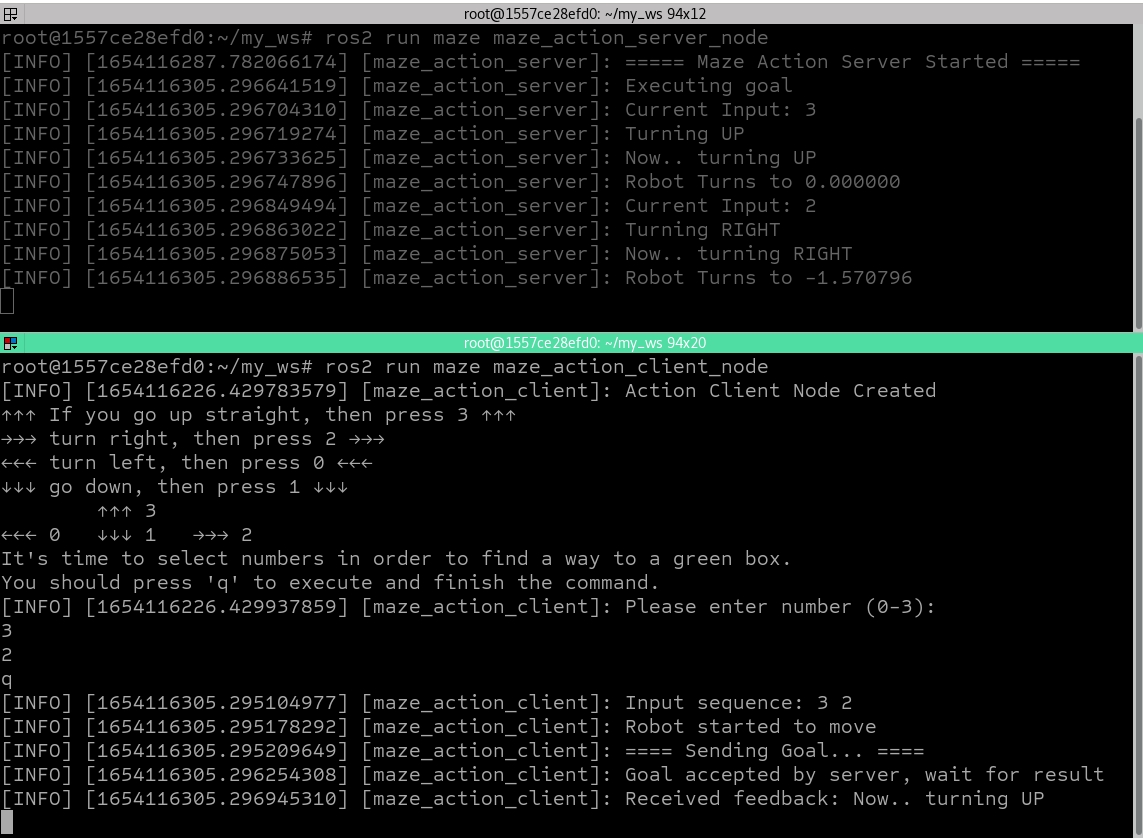 [maze_action_server, maze_action_client 노드 실행]
[maze_action_server, maze_action_client 노드 실행]
action_server_node 실행 후 topic
- turtlebot3 전용으로 실행했을 경우
/cmd_vel /odom /parameter_events /rosout /scan - gazebo 실행 했을 경우
/dolly/cmd_vel /dolly/laser_scan /dolly/odom /parameter_events /rosout
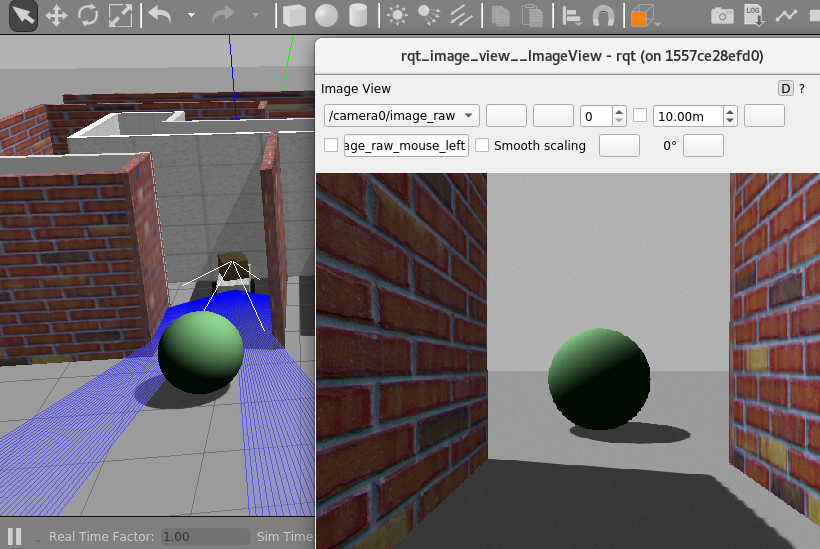
카메라 화면 보기
rqt_image_view 노드 실행으로 보기. 아래의 노드를 실행
ros2 run rqt_image_view rqt_image_view 이미지가 안 나오면 topic 부분을 다시 선택해준다 (또는 토픽 옆 새로고침 아이콘)
/camera0/image_raw
maze_action_client 에서 명령 시퀸스 입력하기
로봇을 미로에서 빠져나올 수 있게 녹색 공이 있는 출구를 향해서 방향을 입력합니다.
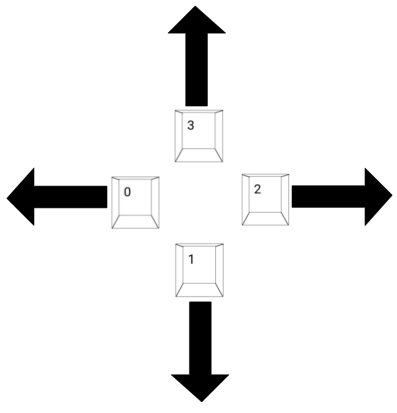 [방향 및 숫자 안내]
[방향 및 숫자 안내]
- 로봇이 녹색 공까지 잘 도달할 수 있도록 갈 방향을 입력해준다. (위 사진을 참고)
(Action Client 에서 입력한 값을 Action Server로 goal 요청합니다) - 최종적으로 q 키를 눌러서 입력을 마치게 되면 로봇이 움직이기 시작한다
(Action Server에서 cmd_vel로 퍼블리싱을 합니다.) - 로봇은 입력된 방향으로 회전을 한 후에 벽이 가까워질 때까지 직진을 합니다.
(로봇의 odometry 와 laser scan을 이용합니다.) - 마지막으로 녹색 공까지 잘 도달하였다면 성공 메세지 전달
(Image subscription을 통해서 녹색 확인)
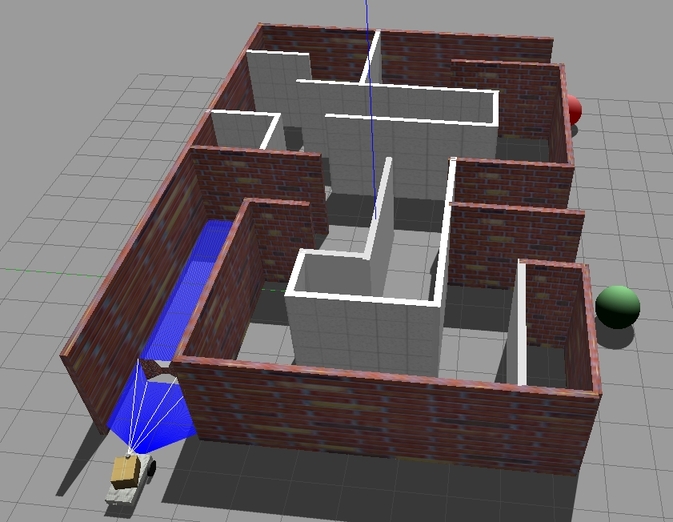 [gazebo- maze_dolly 패키지]
[gazebo- maze_dolly 패키지]
동영상
터틀봇3
turtlebot3 미로 탈출 성공 영상
turtlebot3 미로 탈출 실패 영상
가제보
Gazebo를 이용한 maze_dolly 패키지의 성공 영상
Gazebo를 이용한 maze_dolly 패키지의 실패 영상
reference
- youtube SEOUL G-캠프 채널의 Roadbalance.com 김수영 대표님 유튜브 강좌 및 깃허브
ROS2 maze 포르젝트 - dolly the robot (gazebo 시뮬레이션)
dolly 패키지 깃허브 - turtlebot3
터틀봇3 e-manual