ROS 미니 프로젝트 turtlesim
By
qsp
, Created on 10th Aug 2021
ROS 활용 미니 프로젝트
패키지
distance 패키지 주요기능
double_check 패키지 주요기능
star_pubsub 패키지 주요기능
yh_topic_service 패키지 주요기능
various_turtle_movement 패키지 주요기능
개발환경
사용언어
깃허브
ROS를 공부하면서 재미있게 만들어본 미니 프로젝트 입니다
ROS 활용 미니 프로젝트
ROS에서 다양하게 topic들을 활용해보고
publisher와 subscriber로 통신을 하는 노드와 패키지를 만들었습니다.
특히 turtlesim을 이용해서 거북이를 움직이게 하고 조작할 수 있습니다.
패키지
distance, double_check, star_pubsub, yh_topic_service, various_turtle_movement
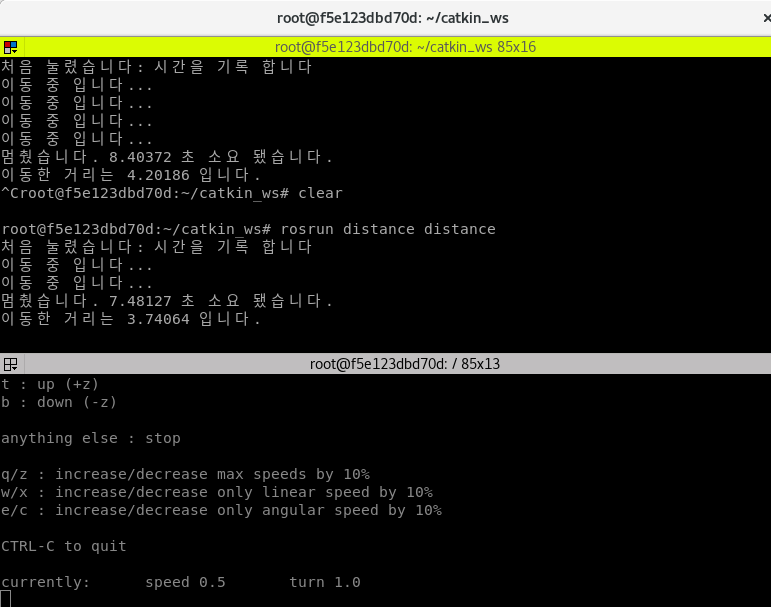
distance 패키지 주요기능
- 거리를 구하는 노드
- cmd_vel을 이용해서 키보드가 눌렸을 때,
즉 움직임이 시작되었을 때로부터 다시 멈추는 순간까지 얼마나 움직였는지 계산하는 노드 입니다.
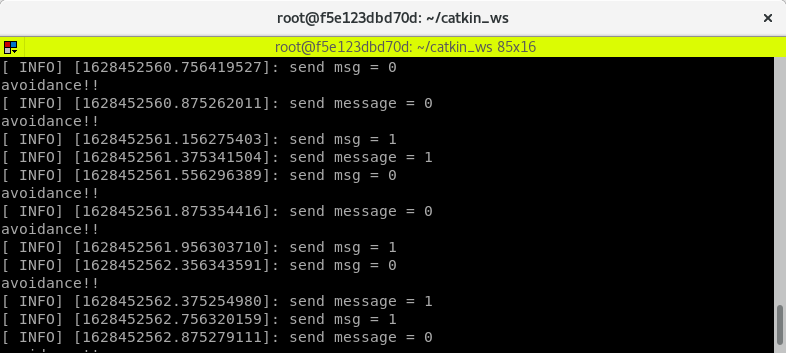
double_check 패키지 주요기능
- 2개의 노드에서 check_pusb1, check_pub2 에서 각각 0.5초, 0.1초 roop_late로 퍼블리싱을 하게 되는데
이를 check_sub 노드에서 subscribed를 해서 각각 겹치는 타이밍에 avoidance를 출력하는 노드 입니다.
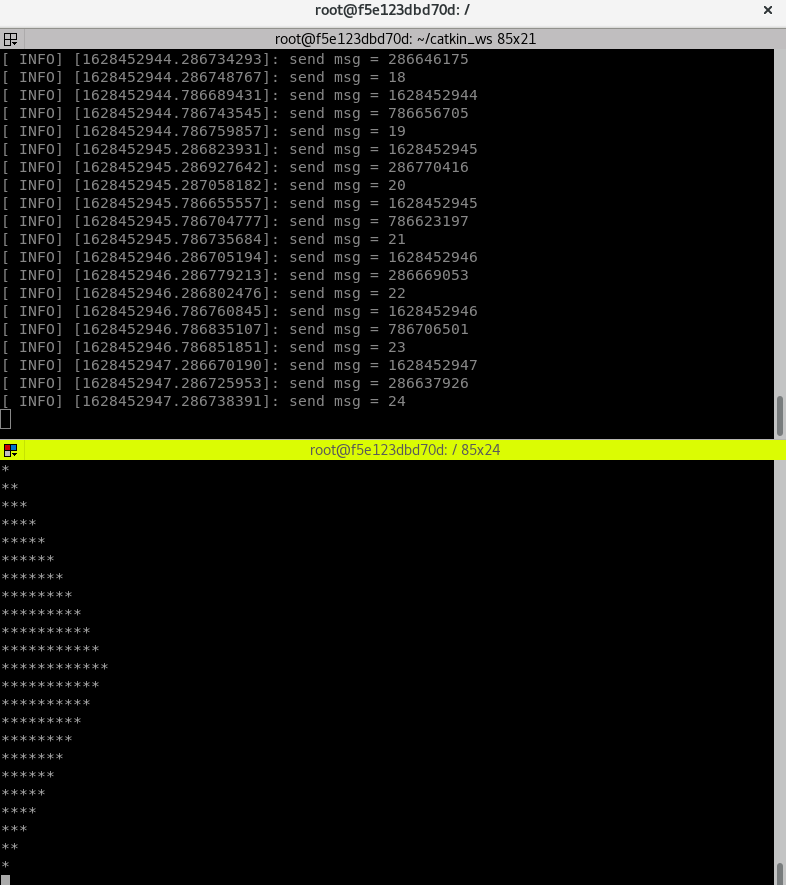
star_pubsub 패키지 주요기능
- 0.5 초씩 발행되는 토픽 topic_star을 구독을 해서 별을 그리는 노드 입니다.
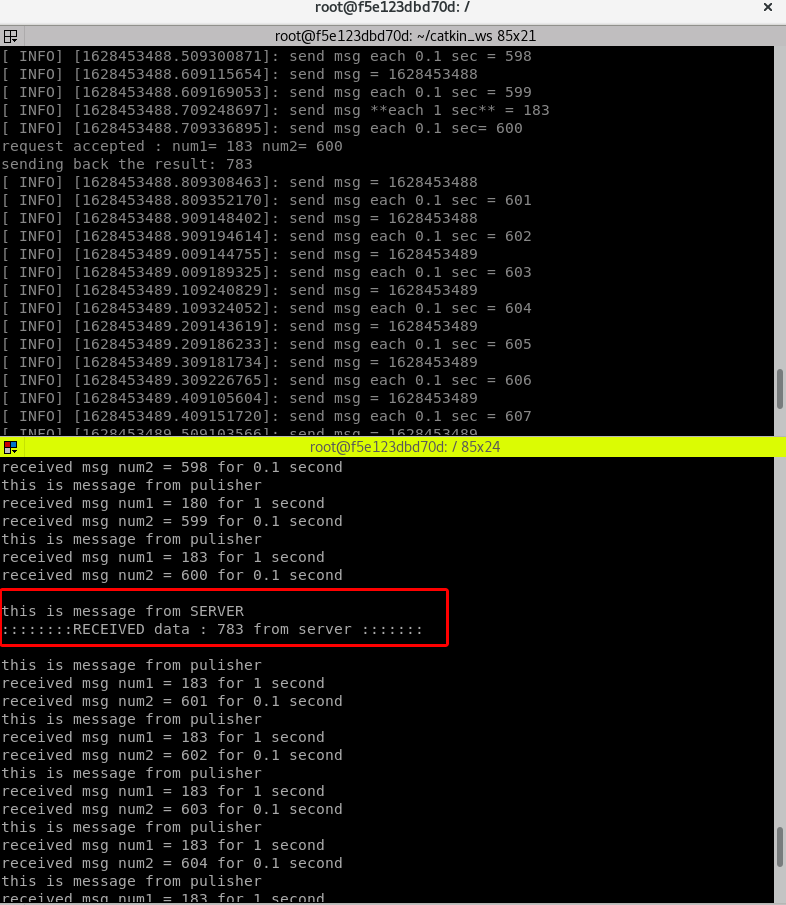
yh_topic_service 패키지 주요기능
- rosservice를 이용해서 서버와 클라이언트로 서비스를 할 수 있는 노드 입니다.
- 10초마다 service 요청을 하고 클라이언트에게 각 숫자를 더해서 응답하게 되는 노드 입니다.
various_turtle_movement 패키지 주요기능
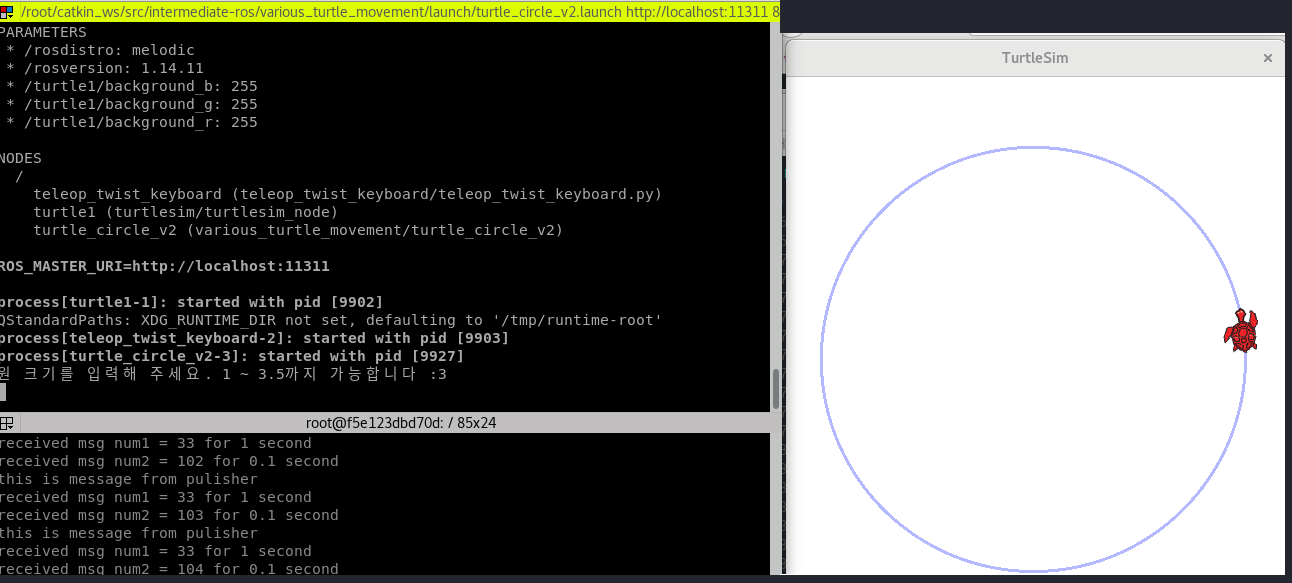
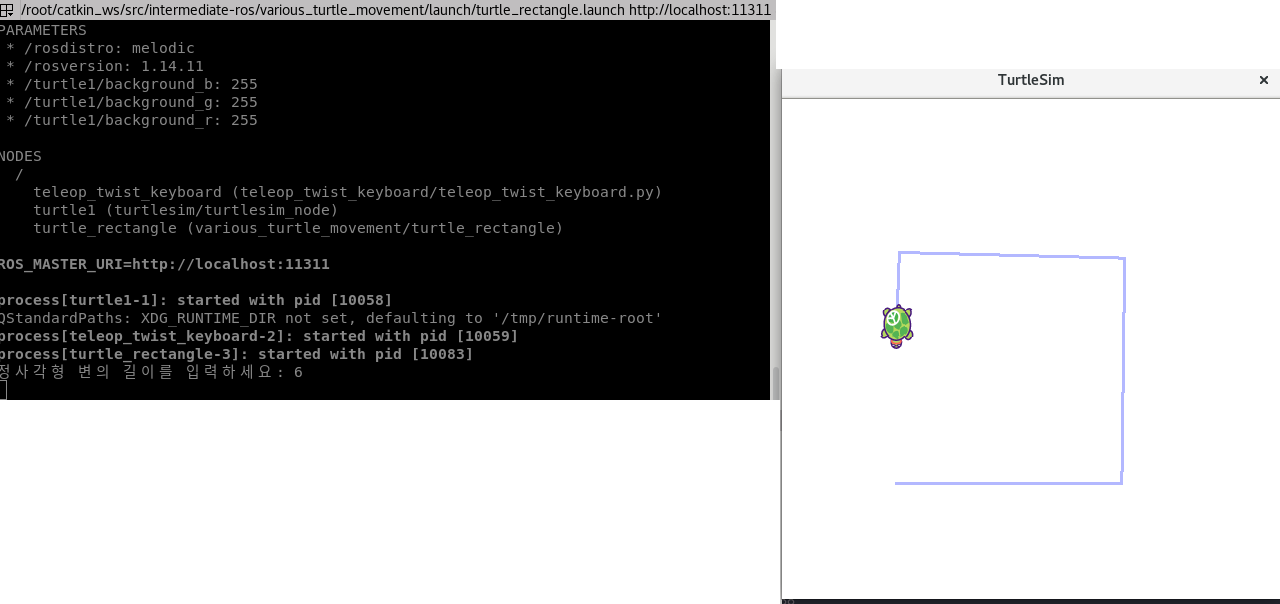
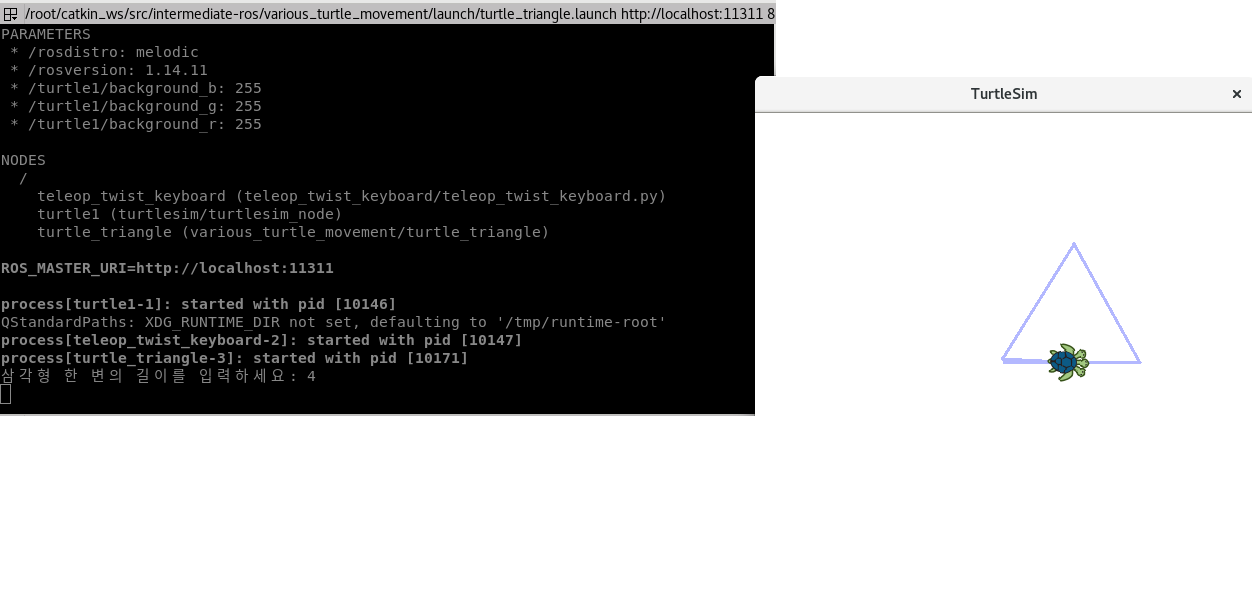
- turtle_circle, turtle_rectangle, turtle_triangle, turtle_pen_v1 다양한 노드에서
각각 원형, 사각형, 삼각형 그리고 랜덤 이동을 하는 프로그램 입니다 - 입력을 받아 거북이 움직임이 시작됩니다. (turtle_circle_v1 제외)
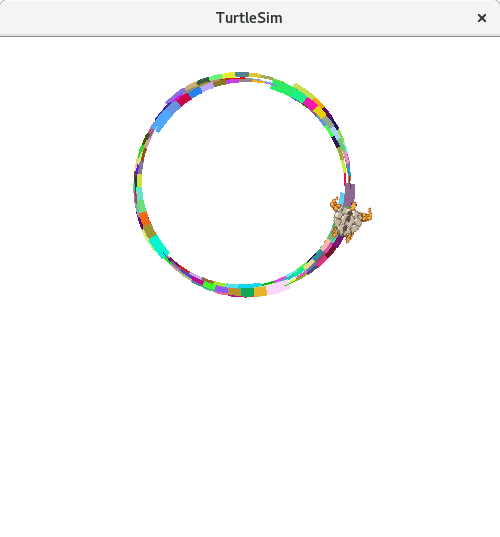
- turtle_pen 노드는 거북이의 궤적을 표시해줍니다. 랜덤하게 색을 표시함
- turtle_pen_v2 노드는 키보드로 거북이의 움직임을 제어 합니다. (u,i,o 키 등..)
- turtle_circle node
- turtle_rectangle node
- turtle_triangle node
- turtle_pen node
개발환경
Utuntu 18.04, ROS melodic, Docker
우분투 바이오닉 비버 LTS버전에서 작동 합니다.
만약 다른 리눅스 배포판을 사용한다면 docker로 가상환경을 만들 수 있습니다.
사용언어
C++
깃허브
깃허브에서 소스코드를 확인할 수 있습니다.