ROS2 parameter 사용하기 c++ 기본
ROS2에서 파라미터를 cpp파일로 노드로 만들어서 실행해보고, 실행한 노드에
파라미터 값을 변경도 해보고
런치파일에서 런치파일을 사용하는 법을 튜토리얼 식으로 정리해봤다~
ROS2 파라미터 만들기 c++ cpp
파라미터 노드를 만들어 보자
먼저 워크스테이션으로 이동 현재 my_ws로 되어 있으므로
cd ~/my_ws/src이동
패키지를 만들어보자
ros2 pkg create --build-type ament_cmake cpp_parameters --dependencies rclcpp해당디렉토리를 보면 파일들이 생성이 되었고
(옵션사항들) package.xml 의 maiatainer에 이름과 이메일등으로 등록해주고, license 는 Apache License 2.0 으로 하기
C++ node를 만들기
cpp_parameters 패키지 디렉토리에 src 디렉토리를 만들고 cpp_parameters_node.cpp 파일을 만들고 복사 붙여넣기
#include <rclcpp/rclcpp.hpp>
#include <chrono>
#include <string>
#include <functional>
using namespace std::chrono_literals;
class ParametersClass: public rclcpp::Node
{
public:
ParametersClass()
: Node("parameter_node")
{
this->declare_parameter<std::string>("my_parameter", "world");
timer_ = this->create_wall_timer(
1000ms, std::bind(&ParametersClass::respond, this));
}
void respond()
{
this->get_parameter("my_parameter", parameter_string_);
RCLCPP_INFO(this->get_logger(), "Hello %s", parameter_string_.c_str());
}
private:
std::string parameter_string_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<ParametersClass>());
rclcpp::shutdown();
return 0;
}이제 파라미터 노드를 하나 만들었다
위의 코드에서 파라미터를 만들어주는데, 이름은 my_parameter, 기본 값은 world 가 된다
1초마다 타이머를 작동시키며 respond 콜백 함수를 호출하게 됨
this->declare_parameter<std::string>("my_parameter", "world");
timer_ = this->create_wall_timer(1000ms,
std::bind(&ParametersClass::respond, this));콜백함수 respond()부분에서는 get_parameter()로 "my_parameter" 를 parameterstring 변수로
지정을 해줘서 파라미터를 받아 올 수 있게 하고, 기본값은 이미 파라미터를 만들때 설정한
world 라는 문자열이 되게 되고, 추후 파라미터를 바꾸는 명령어를 통하면
parameterstring 이 그 값을 받게 되는 것
빌드하기
CmakeLists.txt 파일을 열어서 기존의 find_package(rclcpp REQUIRED) 다음 줄에 붙여넣어준다
add_executable(parameter_node src/cpp_parameters_node.cpp)
ament_target_dependencies(parameter_node rclcpp)
install(TARGETS
parameter_node
DESTINATION lib/${PROJECT_NAME}
)저장을 하고 워크스테이션으로 이동
cd ~/my_ws빌드
colcon build --packages-select cpp_parameterssetup 파일을 source 실행시킨다음에
. install/setup.bash실행
ros2 run cpp_parameters parameter_node이제 실행결과가 아래처럼 나온다
[INFO] [1651628713.631531311] [Parameter_node]: Hello world
[INFO] [1651628714.631502640] [Parameter_node]: Hello world
[INFO] [1651628715.631456525] [Parameter_node]: Hello world파라미터 변경 명령
이제 노드가 실행된 상태에서 파라미터를 조회하는데
다른 터미널을 열어서
ros2 param list결과는
/parameter_node:
my_parameter
use_sim_time노드명은 class를 만들때의 노드 이름이고
그리고 그 아래 나오는 것이 파라미터명이 된다. parameter_node
param set 명령어로 변경을 할 수가 있는데
명령어의 형식은 아래 처럼 입력한다
ros2 param set [노드명] [파라미터명] [변경값]
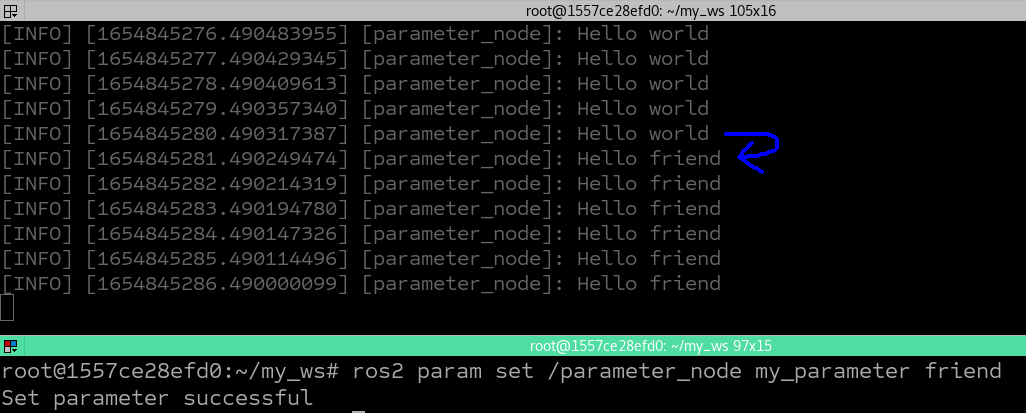
ros2 param set /parameter_node my_parameter friendSet parameter successful 으로 나오며
parameter_node를 실행시켰던 터미널에서는 내용이 변경된 것을 알 수 있다
런치파일 만들기 -파라미터 설정하기
런치파일을 작성하고 런치파일을 실행하면서 자동적으로 파라미터를 설정해서 실행이 가능해진다
다시 cpp_parameters 패키지로 이동을 한 후에 launch 라는 디렉토리를 만들어 준다
cd ~/my_ws/src/cpp_parameters
mkdir launch또는 편한 에디터를 통해서 만들어준다
아래내용으로 런치파일 저장 cpp_parameters_launch.py 로 저장
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package="cpp_parameters",
executable="parameter_node",
name="custom_parameter_node",
output="screen",
emulate_tty=True,
parameters=[
{"my_parameter": "Gandalf"}
]
)
])executable은 ros2 run으로 실행하는 노드명이 된다. 즉, CMakeLists.txt 에서 지정해놓은 노드명이다
output, emulate_tty 의 screen과 True 값은 터미널 콘솔화면에서 출력을 볼 수 있게 해준다
이제 parameters=[ {"파라미터명": "바꿀내용"} ]
이 부분만 지정을 해주면 된다.
이제 다시 CMakeLists.txt 파일을 열어 런치파일을 인식할 수 있게 추가 해준다.
아래 내용을 넣어주자~
install(
DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)이제 빌드를 하면 launch 디렉토리를 복사해서 install 디렉토리에
해당패키지 안에 share 디렉토리에 설치하게 된다
이제 저장 후 다시 워크스테이션로 이동한다
cd ~/my_ws빌드를 해주자
colcon build --packages-select cpp_parameters. install/setup.bash런치파일 실행
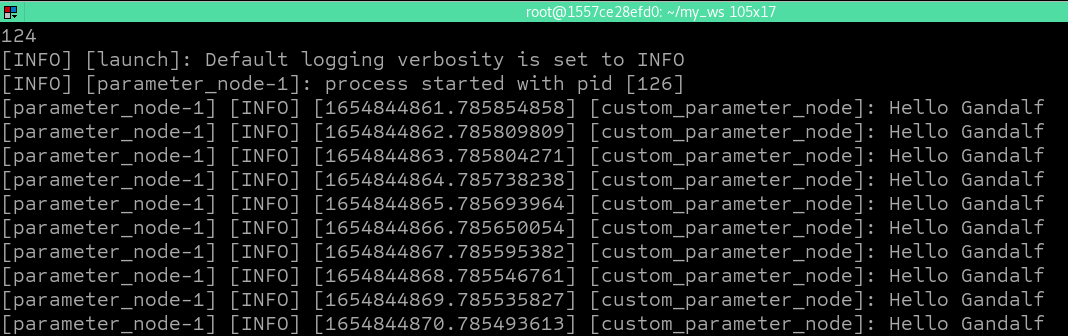
이제 런치파일에서 설정한 파라미터 값이 런치파일을 실행했을 때 잘 변경되어서 나오는지
확인할 수 있다~ 아래줄 실행
ros2 launch cpp_parameters cpp_parameters_launch.py결과는 아래처럼 나오게 된다
 끝
끝