ROS 분석하기 3탄! roslaunch 실행해보기~ .launch 파일 만들어서 실행하기
ros에서 런치 파일을 만들어서 사용하는 법을 배웠다~ 까먹기전에 정리해서 포스팅 합니다~
roslaunch 실행해보기~
많이 노드들을 실행하려면 번거롭고 힘들다. 예를 들어 100개의 노드가 있다면 100개 노드를 rosrun으로 실행하고 물론 roscore 를 포함해서 101번을 실행해야한다
그래서 ROS에서 roslaunch라는 명령어를 제공해서 실행을 할 수 있게 되어 있다
패키지로 이동을 하는데 cd [pkgname] 디렉토리로 이동을 해준다
yh_tutorial 디렉토리로 이동을 하자
$ cd ~/catkin_ws/src/yh_tutorial패키지안에 launch 디렉토리가 있어야 한다. 그래서 launch 디렉토리를 만들어 주자
$ mkdir launch숨김파일인 .launch 파일도 만들어 줘야한다. xml 형식으로 launch태그로 만들게 된다
<launch>
... 이런 형식이다~
</launch>이제 편집기로 파일의 내용을 넣어주자
$ code .launch
# 또는
$ vi .launch아래와 같이 넣어주고 저장해 주자~
<launch>
<node pkg="yh_tutorial" type="pub_test" name="p_test1"/>
<node pkg="yh_tutorial" type="sub_test" name="s_test1"/>
<node pkg="yh_tutorial" type="pub_test" name="p_test2"/>
<node pkg="yh_tutorial" type="sub_test" name="s_test2"/>
<!-- pkg=는 패키지이름 type=은 실제실행할 노드이름(파일이름) name=은 그 해당노드가 실행이 될 때 붙어지는 이름 -->
</launch>이제 런치 파일이 만들어 졌다. 혹시 roscore가 실행되고 있다면 roscore가 실행되는 터미널을 ctrl+c를 눌러서 꺼주자~
이제 roslaunch를 이용해서 실행을 시켜보자
(디렉토리가 launch 디렉토리에 있는지 확인하자)
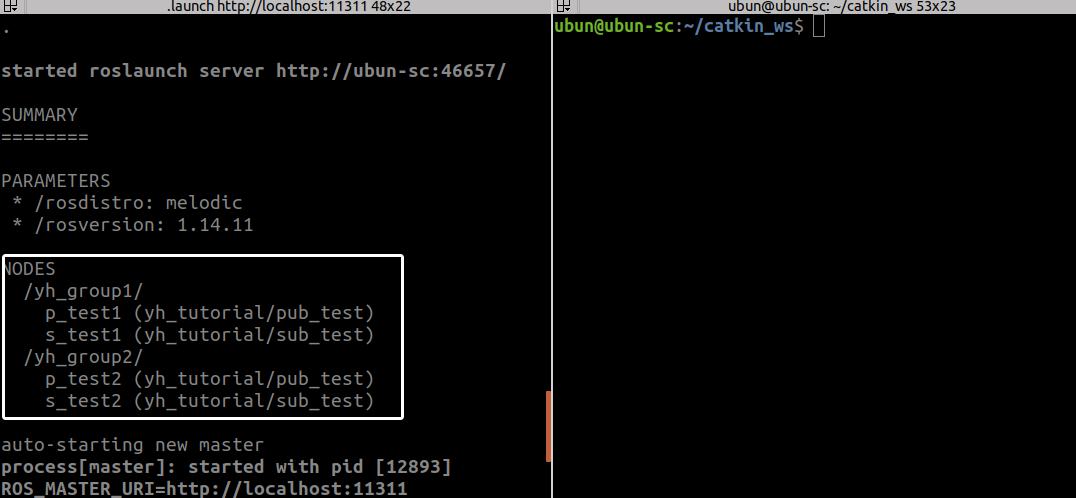
$ roslaunch .launch실행이 되면서
started roslaunch server http://ubun-sc:43625/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.11
NODES
p_test1 (yh_tutorial/pub_test)
s_test1 (yh_tutorial/sub_test)
p_test2 (yh_tutorial/pub_test)
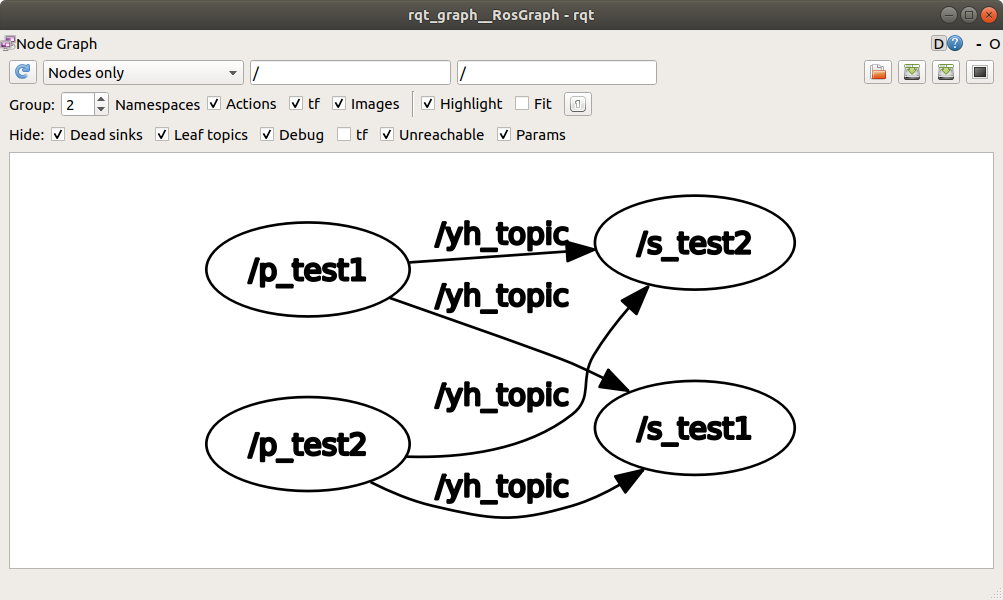
s_test2 (yh_tutorial/sub_test)이렇게 나오는 것을 알 수 있고 어떤 관계로 표시되는 보기위해서 rqt를 실행해보자
rqt_graph해보면 하나의 topic으로 여러개를 실행해서 복잡하게 보인다
 이제 다른 창에 rostopic list 를 해보자
이제 다른 창에 rostopic list 를 해보자아래 처럼 topic은 한개만 나온다.
/rosout
/rosout_agg
/yh_topic왜냐하면 실제로 사용하는 것은 topic은 하나 이기 때문임
실제로 사용할 때는 노드를 더 만들거나 패키지를 더 만들 수도 있겠지만 하나의 노드를 가지고 여러번 사용할 때에는 이럴때는 그룹핑을 해주는 것이 좋다.
그룹핑을 하는 법을 알아보자
다시 로스 런치파일을 수정해주기 위해서 파일 열어 준다
$ code .launch
# 또는
$ vi .launch파일 내용은 group 태그를 이용해서 그룹을 지정해주자
<launch>
<group ns="yh_group1">
<node pkg="yh_tutorial" type="pub_test" name="p_test1"/>
<node pkg="yh_tutorial" type="sub_test" name="s_test1"/>
</group>
<group ns="yh_group2">
<node pkg="yh_tutorial" type="pub_test" name="p_test2"/>
<node pkg="yh_tutorial" type="sub_test" name="s_test2"/>
</group>
<!-- pkg=는 패키지이름 type=은 실제실행할 노드이름(파일이름) name=은 그 해당노드가 실행이 될 때 붙어지는 이름 -->
</launch>저장을 한 후에 다시 로스 런치를 실행해보자
$roslaunch .launch그러면 이번에는 화면이 아래처럼 바뀐다
 그리고 나서 다시 rqt_graph 확인하기
그리고 나서 다시 rqt_graph 확인하기
rqt_graph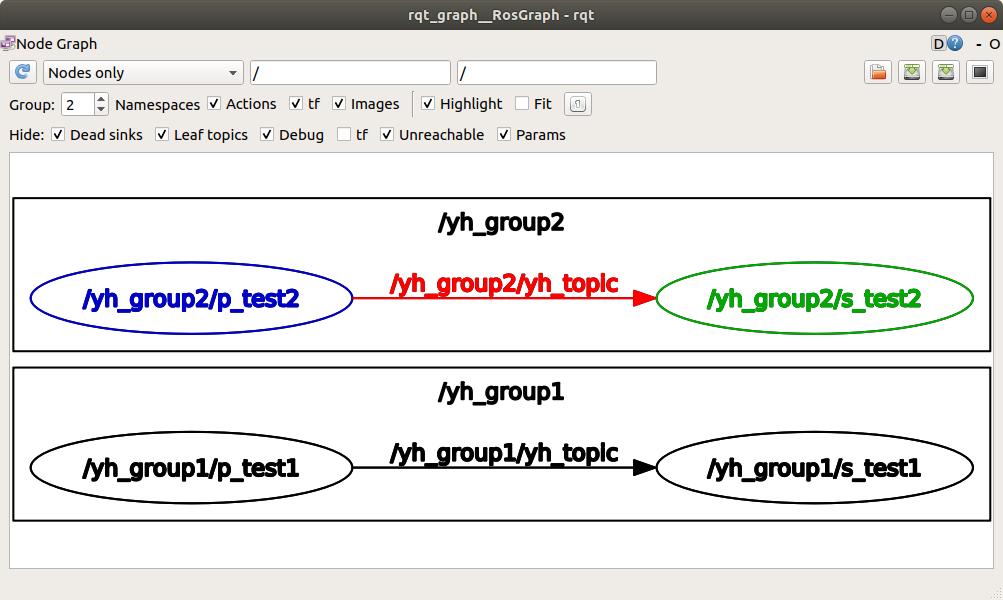 그룹화된 것을 알 수 있다
그룹화된 것을 알 수 있다