ROS service 통신 만들기 튜토리얼 2
ROS service 통신을 하기 위해서 튜토리얼 2탄
패키지와 노드 파일들이 만들어졌다면 빌드를 해보자!
service 통신 만들기 튜토리얼 2
이전 과정이 궁금하다면 아래 링크를 확인해주세요
ROS topics, services and actions 알아보기
🤖
이제 service 만들기의 패키지가 만들어졌다면
package.xml 파일을 열어서
간단하게 description이나 maintainer의 이름, 이메일 주소 등을 수정해보자
필요시 author email 도 등록
튜토리얼에서는 사실 별거 아니여서 정확히 넣어줄 필요는 없겠지만(?),
package.xml 파일이 있는 이유는
오픈소스이기 때문에 메인테이너등을 입력해줘서 오픈소스라는 생태계에 기여를 할 수 있게 되는 것 같다
예를 프로젝트를 만들었다면 maintainer 등을 입력을 해서 피드백을 받을 수도 있고, 또 author email 같은 부분은 혼자 프로젝트를 할 수 없기 때문에 공동 작업한 사람들의 이메일 주소를 넣어 주는 것이라고 한다
아직은 잘 모르겠지만 뭐 그렇다 ㅋㅋㅋ
빌드전에 CMakeLists.txt 파일 수정하기
topic 통신을 할 때와 패키지의 CMakeLists.txt를 수정하는 것은 거의 비슷하다
먼저 yh_tuto_service의 CMakeLists.txt를 열어 준다. 편한 에디터로 열어주자 그리고 나서 아래 내용을 확인한다 (경로는 ~/catkin_ws/src/yh_tuto_service 가 된다)
msg 즉, topic을 했을 때랑은 다르게 이번에는 service 부분을 찾아준다
윗 부분의 주석을 풀고 내용을 srv 디렉토리에 만든 yh_srv.srv 파일을 넣어준다 .srv 파일을 넣어준다
add_service_files(
FILES
yh_srv.srv
)generate_messages 부분을 찾아서 주석이 되어 있는 것을 풀어준다
generate_messages(
DEPENDENCIES
std_msgs
)catkin_package의 LIBRARIES, CATKIN_DEPENDS 주석을 풀고 message_generation 지워준다
아래처럼 된다
catkin_package(
# INCLUDE_DIRS include
LIBRARIES yh_tuto_service
CATKIN_DEPENDS roscpp std_msgs
# DEPENDS system_lib
)요렇게 생긴 놈 아래 부분을 작업할 차례
###########
## Build ##
###########빌드 부분 이후를 찾아서 바꿔준다
# add_executable(${PROJECT_NAME}_node src/yh_tuto_service_node.cpp)를 찾아서 노드이름을 을 지정해준다.
${PROJECT_NAME}_node 부분을 노드 이름을 써주고 이하는 파일.cpp로 적어준다 아래처럼
add_executable(srv_server src/srv_server.cpp)
add_executable(srv_client src/srv_client.cpp)그리고
add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})도 찾아서 ${PROJECT_NAME} 부분에 서비스 서버와 클라이언트 이름을 넣어준다 아래처럼 바꿈
add_dependencies(srv_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(srv_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})이제 마지막으로 target_link_libraries 부분의 서비스 이름을 바꿔준다
target_link_libraries(srv_server
${catkin_LIBRARIES}
)
target_link_libraries(srv_client
${catkin_LIBRARIES}
)
이제 빌드를 한 후에 실행을 해보자~
빌드를 할 때 주의점은 위의 서버나 클라이언트 이름이 겹치면 안 된다는 것에 주의하자
$ cd ~/catkin_ws로 이동을 한 후에 catkin_make를 실행하자
$ catkin_make빌드가 에러가 발생했다면.. 어쩔 수 없게도 ㅠ 디버깅을 해보자~
(다 맞는 건 아니지만.. 교수님께 알려주신 팁!)
빌드를 시작하고 %가 올라가지다가 에러가 발생했으면 문법, 또는 cpp상에서 잘못했을 경우가 높아짐을 참고하자
아예 퍼센트가 시작도 안 된 상태라면 CMakeLists.txt 파일에서 경로, 파일명 등을 다시 한번 살펴보자
이제 실행을 해 볼 차례
빌드가 무사히 잘 되었다면!😛
터미널에 roscore, rosrun 등으로 명령어를 입력해야하는데
추천1은 터미널 분할이 잘 되는 terminator라는 터미널 프로그램을 사용하는 것이다. 화면을 분할해서 쓸 수 있어서 매우 유용한 방법이다.
그것도 아니면 ㅋㅋ vscode를 사용하는 방법이다.
(솔직히 이 방법, 저 방법 다 써보는 것을 천😎 ㅋㅋㅋ )
vscode를 열어서 오픈 폴더를 해서 현재 yh_tuto_service 를 통채로 열어주자
혹시 만약 터미널이 친숙하다면 ㅋㅋ
$ cd ~/catkin_ws/src/yh_tuto_service
$ code .이렇게 하면 현재의 디렉토리를 기준으로 vscode가 실행되게 된다. 매우편리👍👍 ㅋㅋ
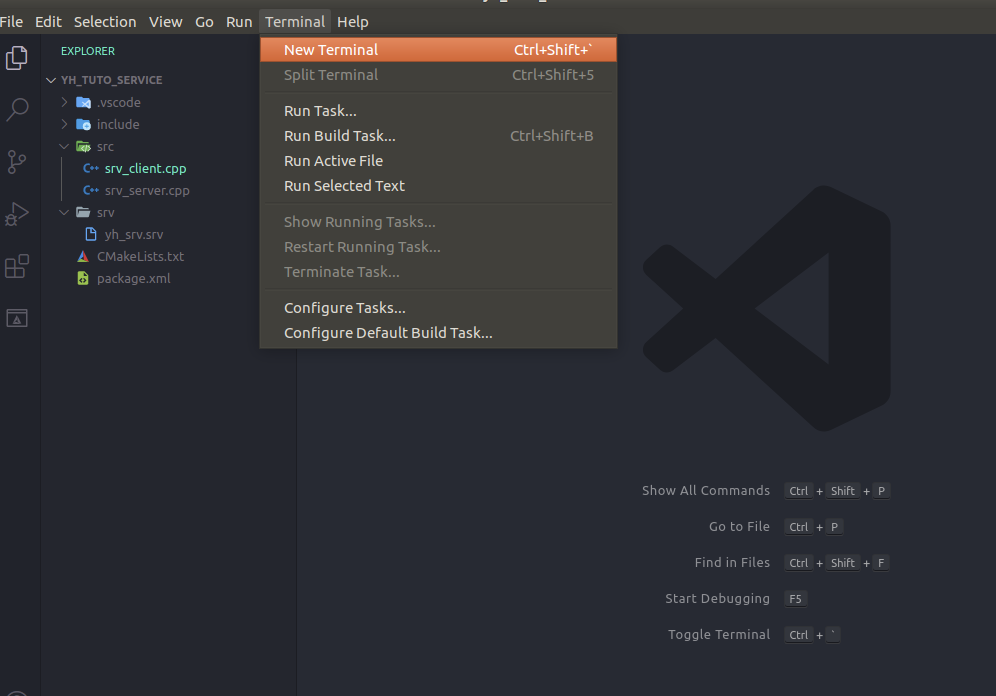
이제 vscode 메뉴를 이용해서 터미널을 열어보자~
터미널 메뉴에서 새 터미널을 선택
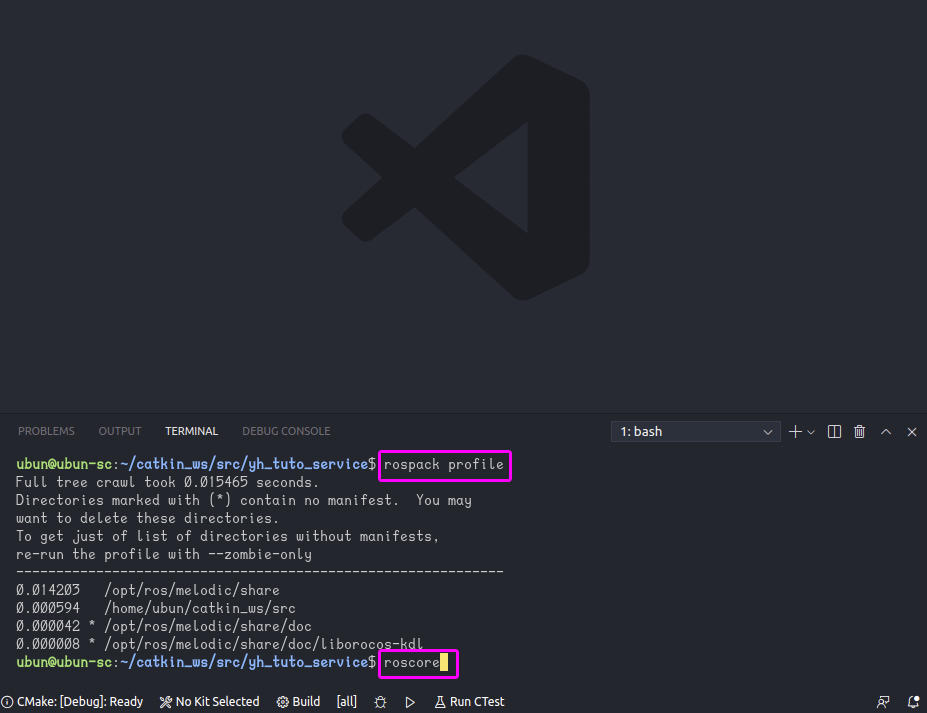
 터미널이 열리면 차례차례
터미널이 열리면 차례차례
$ rospack profile
$ roscore차례차례 입력을 해주면 된다.
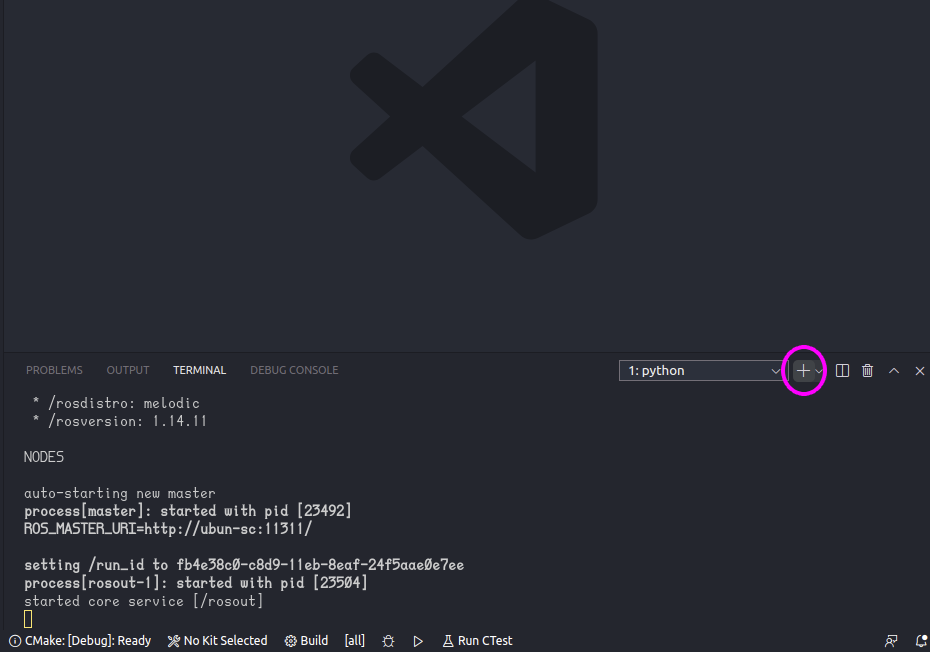
 이제 roscore 를 해서 마스터가 열렸고 (계속 실행이 되고 있는 상태임)
이제 roscore 를 해서 마스터가 열렸고 (계속 실행이 되고 있는 상태임)
이제 새로운 터미널을 열어서 이제는 서버와 클라이언트 노드를 실행해줄 차례이다
아래 처럼 터미널의 아래의 오른쪽 부분의 + 버튼을 눌러 주면 된다
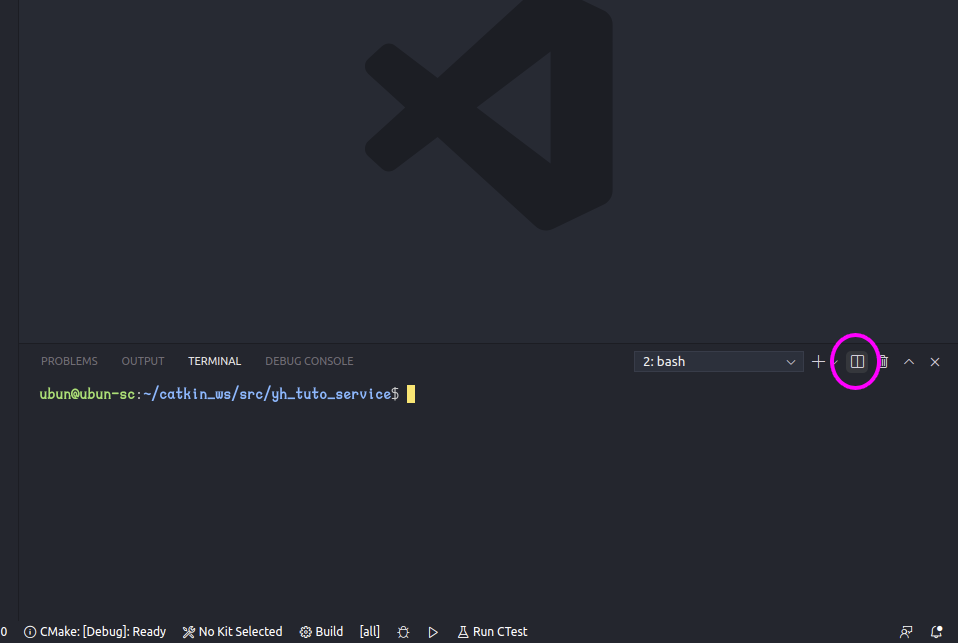
 이제 새로운 터미널이 열렸는데 이제는 +버튼 바로 옆의 아이콘을 클릭해서 터미널을 2개로 분할을 해주자
이제 새로운 터미널이 열렸는데 이제는 +버튼 바로 옆의 아이콘을 클릭해서 터미널을 2개로 분할을 해주자
 이제 한쪽에는
이제 한쪽에는
$ rosrun yh_tuto_service srv_rver 또 다른 한쪽에는 클라이언트를 실행하는데 숫자 2개의 파라미터를 넘겨준다
$ rosrun yh_tuto_service srv_client 10 20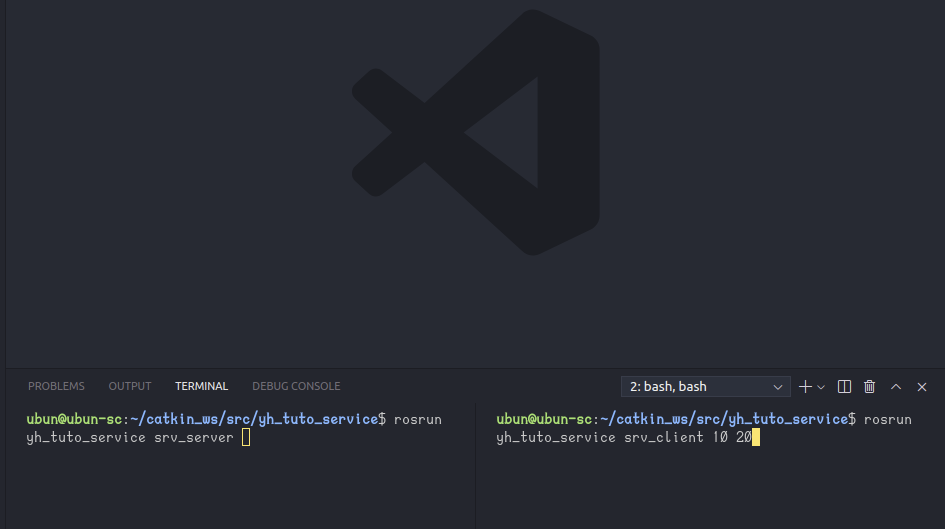 먼저 왼쪽 터미널의 서버 노드를 먼저 실행을 해준다.
먼저 왼쪽 터미널의 서버 노드를 먼저 실행을 해준다.
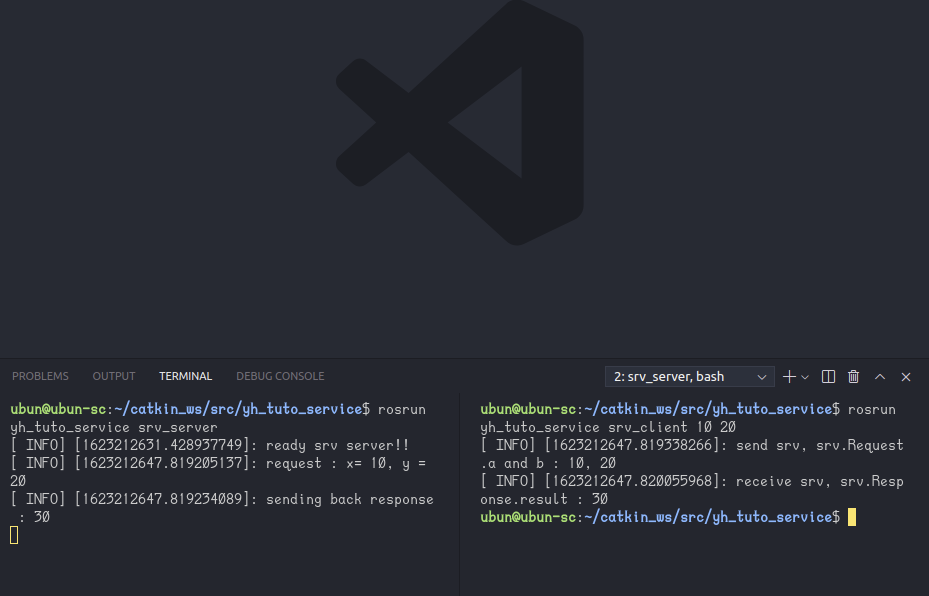
ready srv server!!라고 나오면 바로 오른쪽 터미널의 클라이언트 노드를 실행을 시켜주면 된다
그러면 아래와 같이 클라이언트에서 10 20으로 서버에 요청을 하면 30이란 값을 넘겨주는 Service 통신이 되게 된다
끝!