ROBOTIS Turtlebot3 burger 터틀봇3 버거 조립하기
By
qsp
, Created on 27th Feb 2022
Turtlebot3 조립하기
 박스 4개로 잘 포장이 되어 있다
박스 4개로 잘 포장이 되어 있다
 라즈베리파이 싱글보드컴퓨터가 4B로 업그레이드가 되었다~ 기분이 좋다 ㅋㅋ
라즈베리파이 싱글보드컴퓨터가 4B로 업그레이드가 되었다~ 기분이 좋다 ㅋㅋ
직업훈력학교에서 라즈베리파이 실습을 한 후에 빨리 반납이 되어서 조금 아쉬웠는데~ ㅋㅋ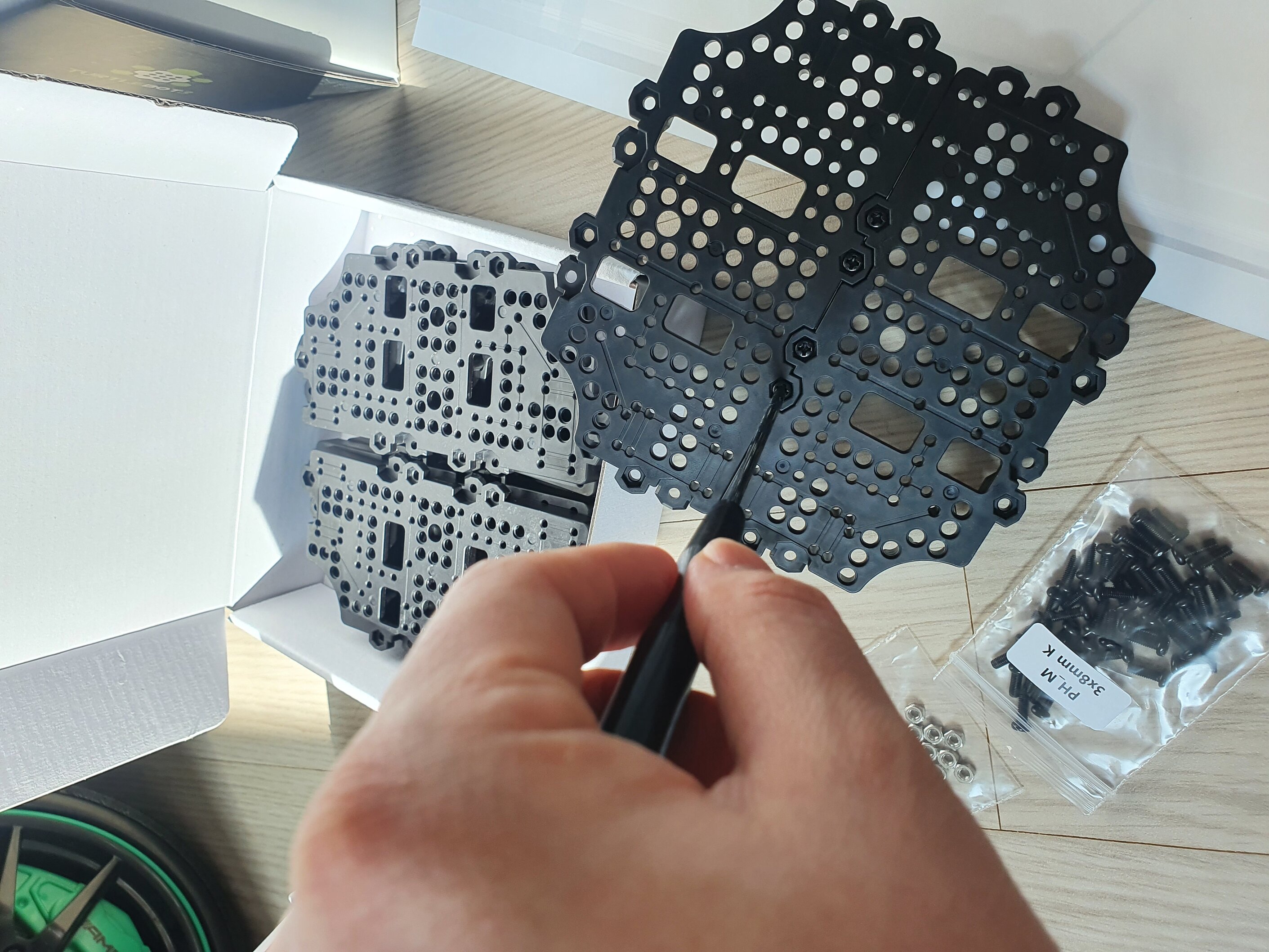 먼저 와플 판을 조립해준다~ 볼트와 너트로 고정을 시킴
먼저 와플 판을 조립해준다~ 볼트와 너트로 고정을 시킴
조립방식은 같으나 2번째 와플판은 볼트와 너트를 반대 방향으로 체결 맨 앞에 캐스터 휠을 달고 바퀴와 모터를 연결
맨 앞에 캐스터 휠을 달고 바퀴와 모터를 연결
모터를 DYNAMIXEL 이라고 불리는 것 같다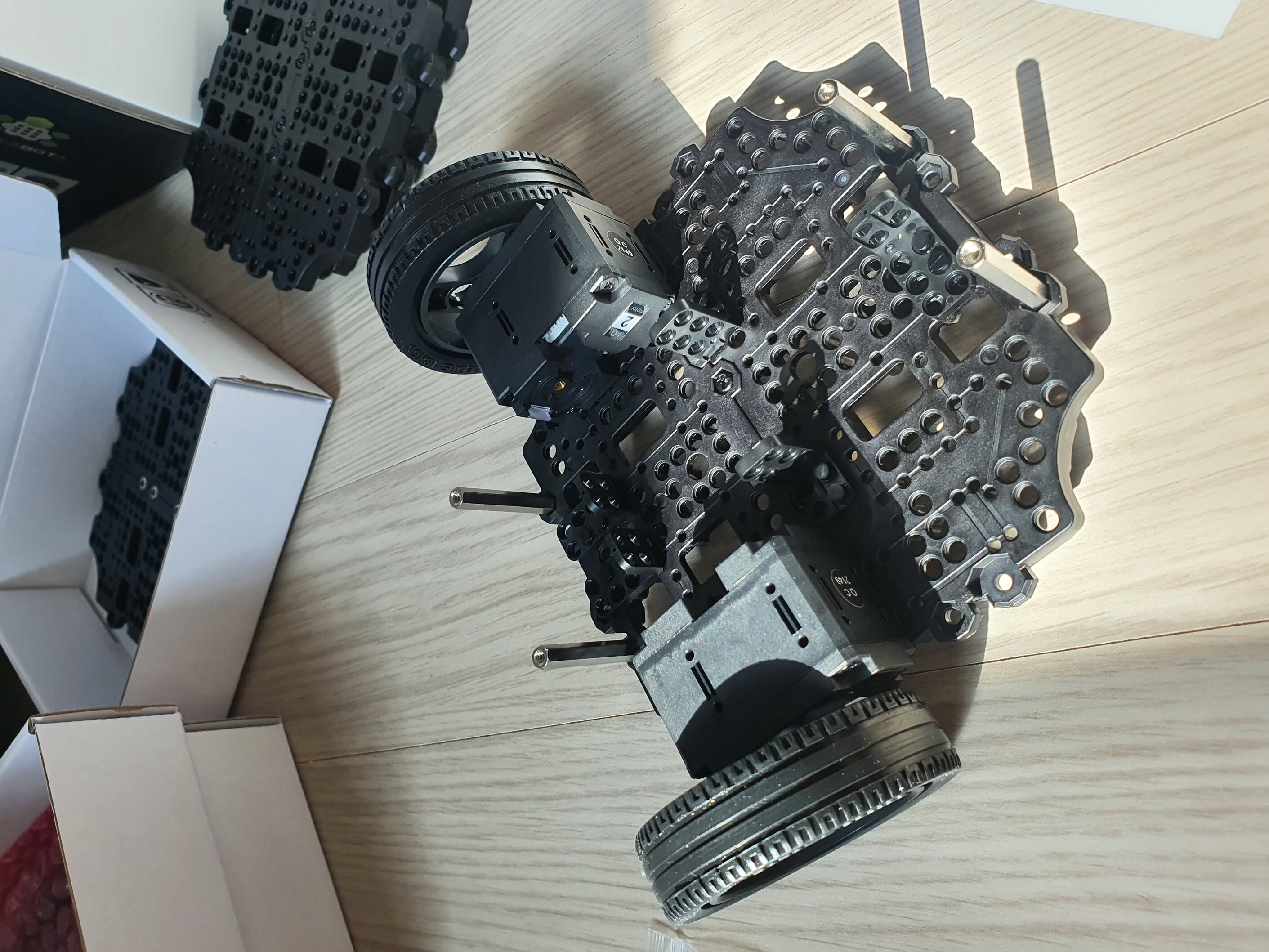 2개의 DYNAMIXEL이 고정이 되었고~ 배터리를 고정시킬 L형 브라켓도 끼워준다
2개의 DYNAMIXEL이 고정이 되었고~ 배터리를 고정시킬 L형 브라켓도 끼워준다
이때 브라켓 사이로 배터리가 들어가니깐 위치가 어디가 될지 대충 감을 잡으면 더 좋을 듯 하다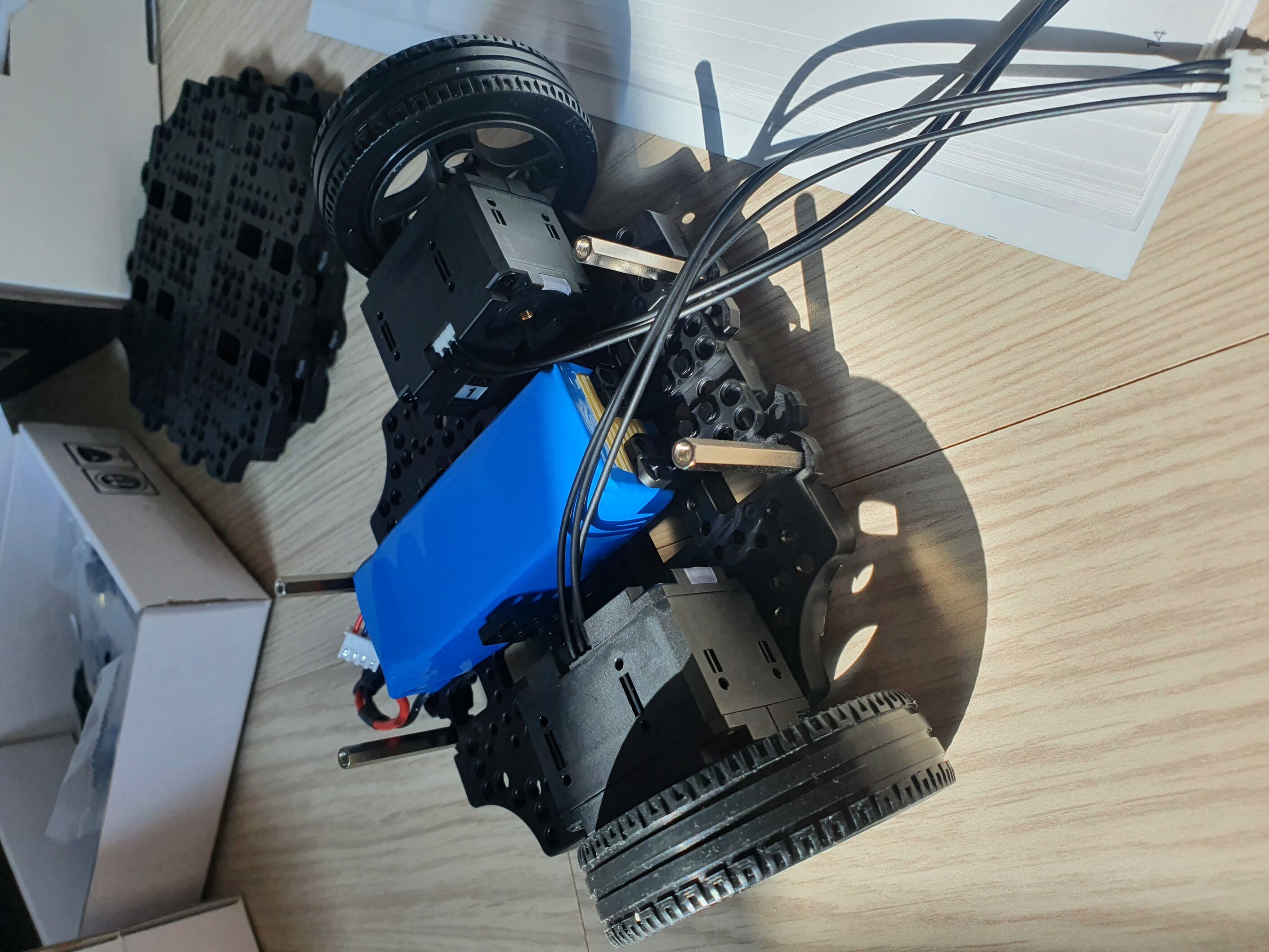 배터리를 올려 놓는다~ 그리고 케이블을 연결해준다
배터리를 올려 놓는다~ 그리고 케이블을 연결해준다
그리고 충전을 위해서 배터리는 탈착이 가능하게 되어있는 듯해서 볼트등으로 고정을 하지는 않는다 두번째 판을 조립하고 기둥도 세우고 OpenCR보드를 고정시킬 수 있는 부품을 연결해준다
두번째 판을 조립하고 기둥도 세우고 OpenCR보드를 고정시킬 수 있는 부품을 연결해준다
 2번째 와플 판을 연결시키기 전에 케이블을 미리 구멍으로 넣어준다
2번째 와플 판을 연결시키기 전에 케이블을 미리 구멍으로 넣어준다
그리고 배터리와 연결되는 케이블도 미리 연결하지 말고 넣어준다 (뭉툭한 끝 부분이 구멍으로 안 들어감)
마지막으로 배터리와 케이블을 결합시키지는 말아야 한다고 함
(실수로 연결해버림 ㅋㅋ)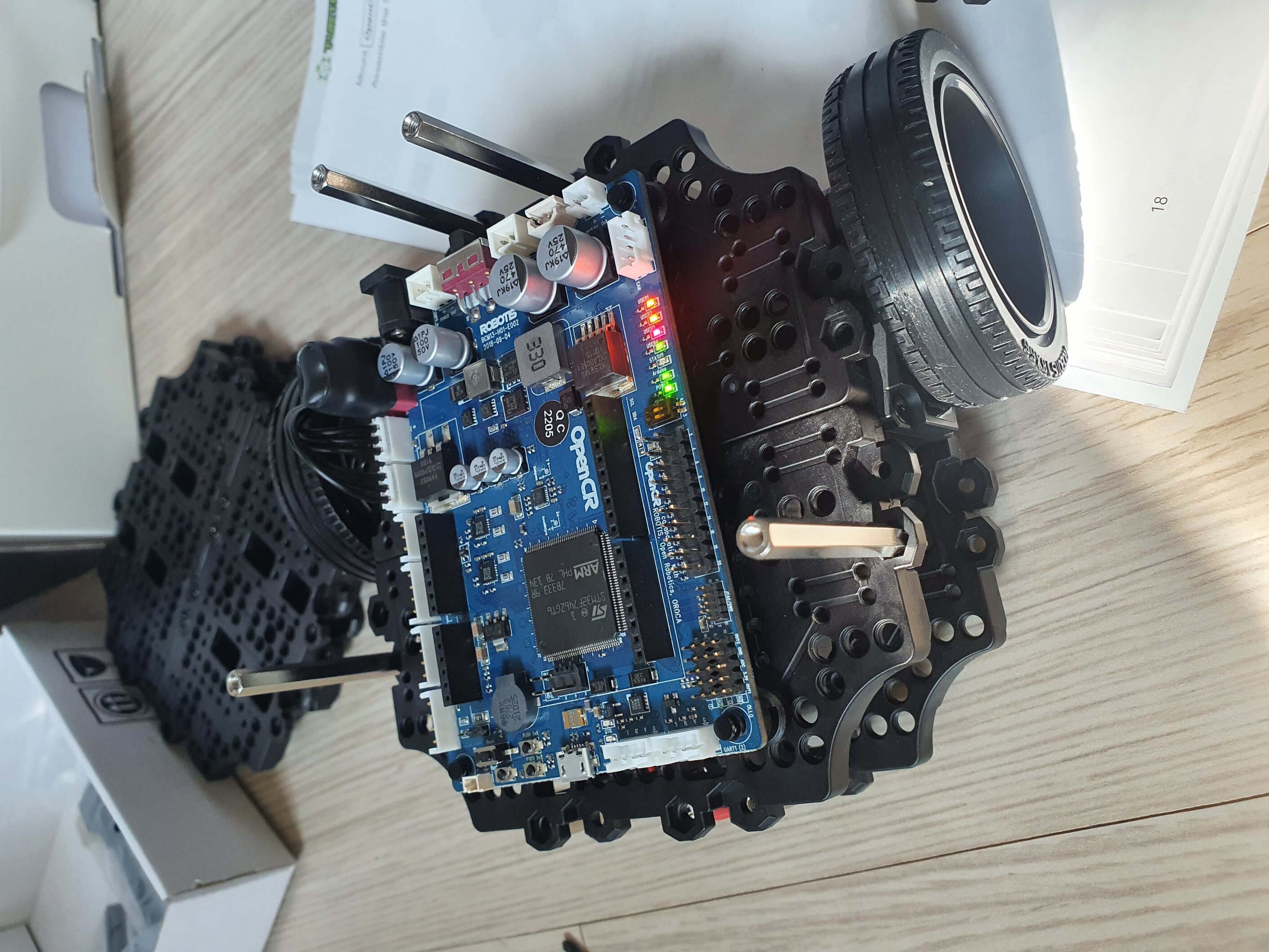 opencr 보드를 연결시키고 2번째 판 결합
opencr 보드를 연결시키고 2번째 판 결합
사진처럼 배터리 케이블은 연결시키지 말아야했는데 전원케이블을 연결하자마자 켜진다
전원케이블을 미리 연결 시키지 말자. 메뉴얼에 잘 나와있음 ㅠ 라즈베리파이4B 결합하기 전에 usb케이블을 미리 끼워서 구멍으로 넣은 다음에 조립하자
라즈베리파이4B 결합하기 전에 usb케이블을 미리 끼워서 구멍으로 넣은 다음에 조립하자
특히 아래쪽에 있는 기판은 usb2lds 인데 usb로 LDS와 연결이 되는데
기판이 고정된 상태에서 usb케이블을 연결하려고 하면 쉽지 않다
미리 케이블을 연결해줘야 작업이 편하다 이제 3번째 판의 구멍을 통과한 usb케이블을 opencr에 연결해준다
이제 3번째 판의 구멍을 통과한 usb케이블을 opencr에 연결해준다
케이블이 새거라 빡빡해서 적당히 구부려주면서 해주면 좋다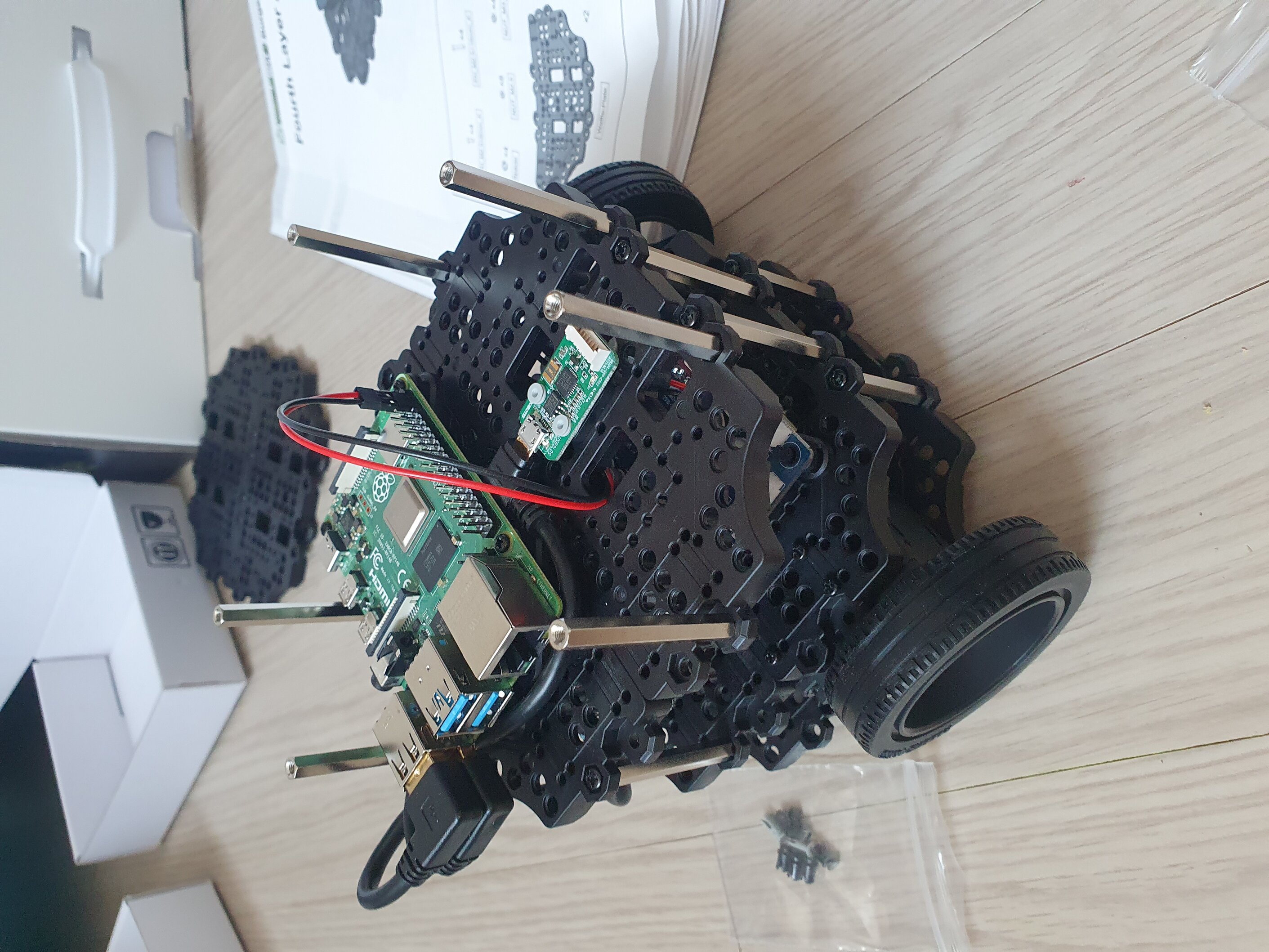 라즈베리피파이는 GPIO라는 핀들이 있는데 모터등을 제어할 수 있게 된다고 알고 있다
라즈베리피파이는 GPIO라는 핀들이 있는데 모터등을 제어할 수 있게 된다고 알고 있다
(다목적 용도의 input/output): 디지털 신호를 입력/출력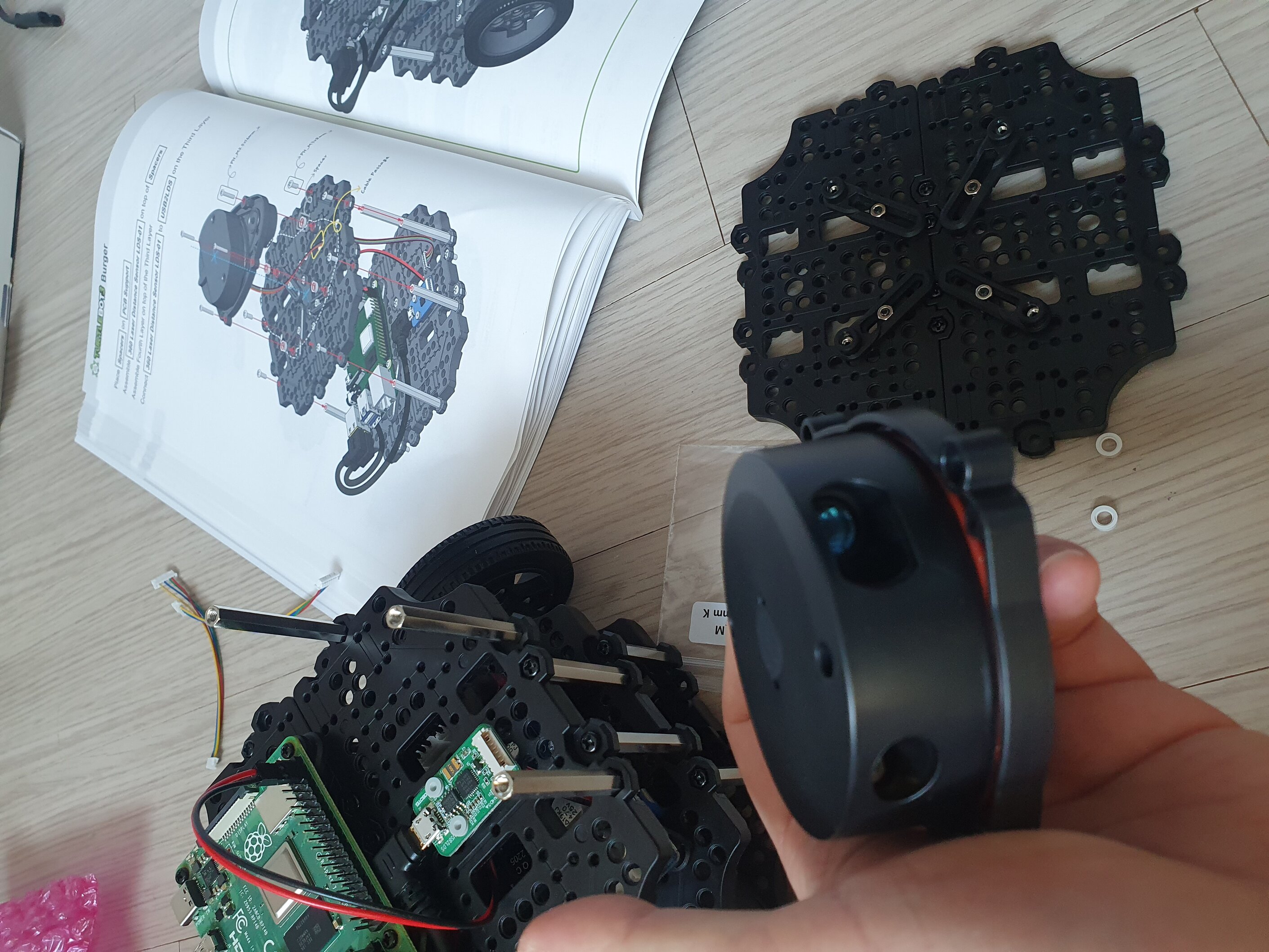 LDS (Laser Distance Sensor) 2세대 모델로 업그레이드가 되었다고 한다~
LDS (Laser Distance Sensor) 2세대 모델로 업그레이드가 되었다고 한다~
마지막 4번째 판에 LDS를 부착할 수 있게 준비를 해준다
적당히 위치를 잡은 다음에 나중에 드라이버로 고정시켜주면 된다
마지막으로 4번째 판을 결합하기전에 구멍으로 케이블을 통과시켜주고 결합을 해주자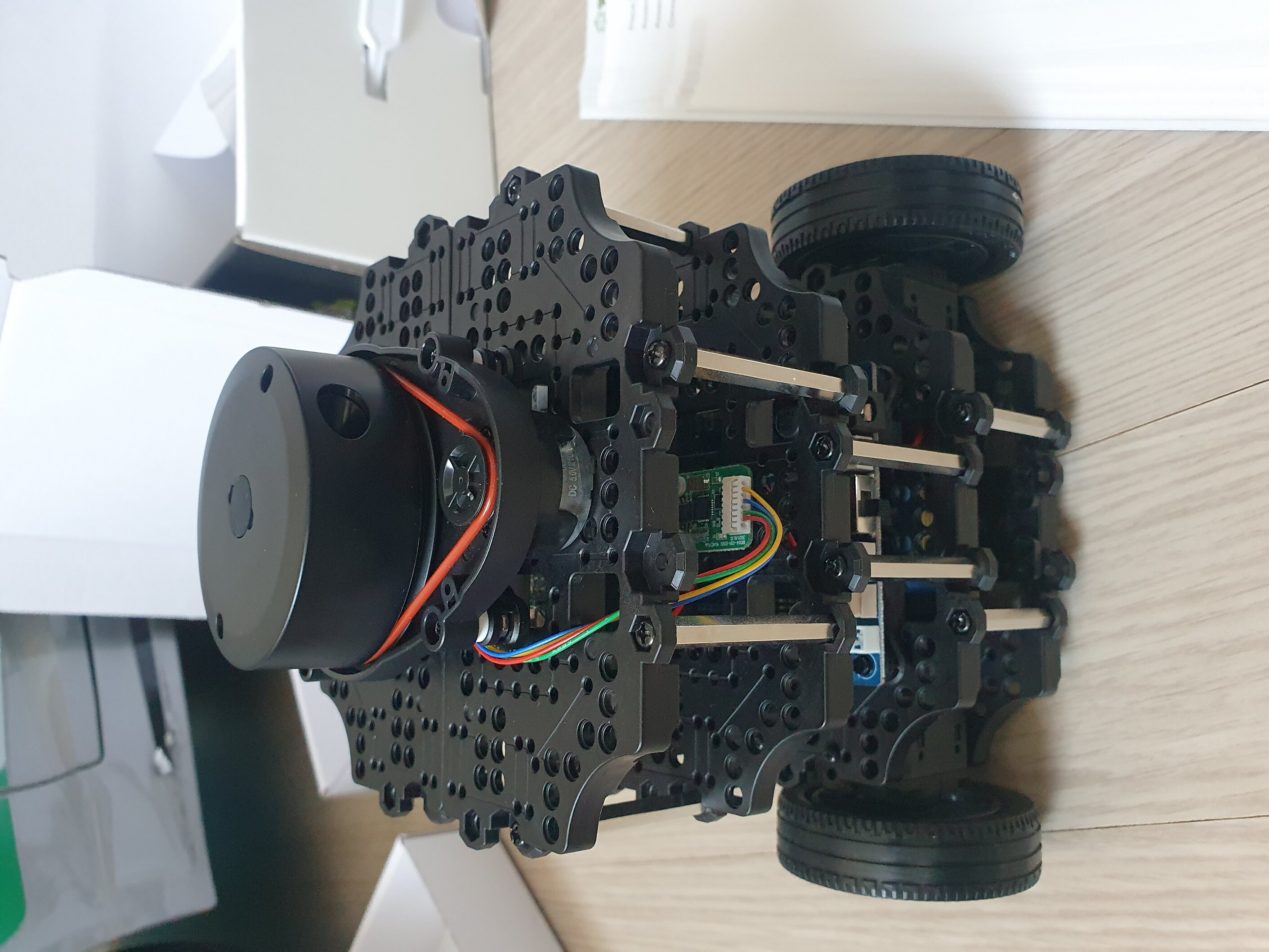 로보티즈의 터블봇3 버거가 완성이 되었다~
로보티즈의 터블봇3 버거가 완성이 되었다~
혹시라도 망가질까봐 조심조심 그리고 사진도 찍으면서 하다보니 꽤 오래걸렸다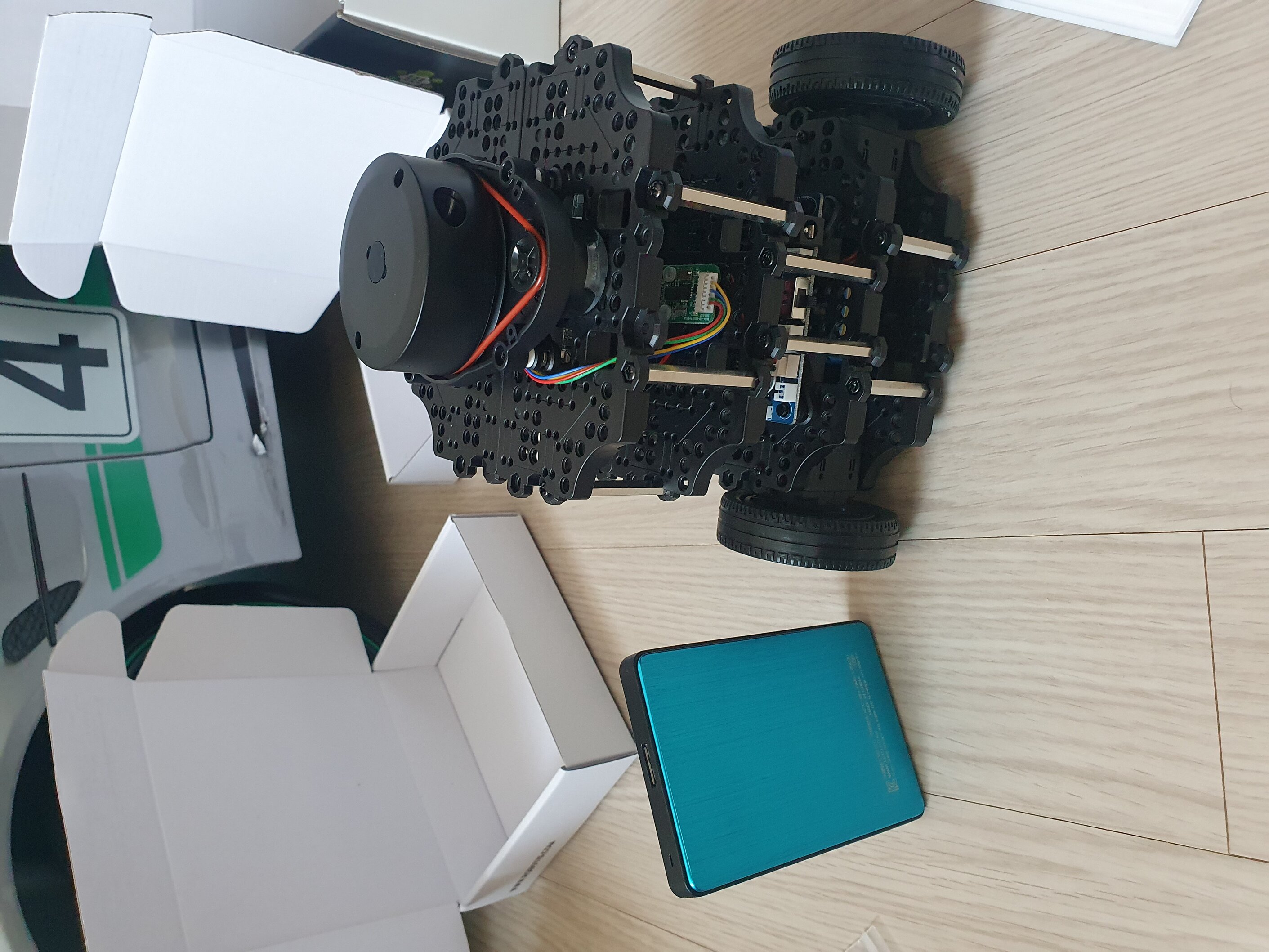 2.5인치 외장 하드디스크와 크기 비교를 해보았다~
2.5인치 외장 하드디스크와 크기 비교를 해보았다~
버거가 꽤 귀엽구먼! ㅋㅋㅋ
약 10일정도 걸려서 로보티즈의 터틀봇3가 도착을 했다
워낙 PC조립은 좋아해서 많이 해보았지만 그것도 너무 오래된 일이고
그나마 직업훈련학교를 다닐 때 라즈베리파이를 가지고 실습했던 것이 도움이 될 듯하다
그래도 배운게 있으니 써먹을 수 있어서 다행이다 ㅋㅋ
Turtlebot3 조립하기
Turtlebot3 burger 워낙 패키징이 깔끔하게 잘 되어 있어서 너무 만족스러웠다.
거기에다가 매뉴얼이 책 처럼 되어 있는데, 나름 매뉴얼을 정독하는 편이라 ㅋㅋ
이것도 매뉴얼만 봐도 조립이 가능하게 쉽게 잘 기술이 되어있었다.
또한 로보티즈에서 조립 방법을 영상으로 유튜브에 올려져있다
TurtleBot3 31 Burger Assembly
그래서 딱히 조립 방법을 포스팅 하기보다는
후기로 남기고 싶어서 사진, 포스팅 하려고 한다
박스 4개로 잘 포장이 되어 있다
라즈베리파이 싱글보드컴퓨터가 4B로 업그레이드가 되었다~ 기분이 좋다 ㅋㅋ직업훈력학교에서 라즈베리파이 실습을 한 후에 빨리 반납이 되어서 조금 아쉬웠는데~ ㅋㅋ
먼저 와플 판을 조립해준다~ 볼트와 너트로 고정을 시킴조립방식은 같으나 2번째 와플판은 볼트와 너트를 반대 방향으로 체결
맨 앞에 캐스터 휠을 달고 바퀴와 모터를 연결모터를 DYNAMIXEL 이라고 불리는 것 같다
2개의 DYNAMIXEL이 고정이 되었고~ 배터리를 고정시킬 L형 브라켓도 끼워준다이때 브라켓 사이로 배터리가 들어가니깐 위치가 어디가 될지 대충 감을 잡으면 더 좋을 듯 하다
배터리를 올려 놓는다~ 그리고 케이블을 연결해준다그리고 충전을 위해서 배터리는 탈착이 가능하게 되어있는 듯해서 볼트등으로 고정을 하지는 않는다
두번째 판을 조립하고 기둥도 세우고 OpenCR보드를 고정시킬 수 있는 부품을 연결해준다
2번째 와플 판을 연결시키기 전에 케이블을 미리 구멍으로 넣어준다그리고 배터리와 연결되는 케이블도 미리 연결하지 말고 넣어준다 (뭉툭한 끝 부분이 구멍으로 안 들어감)
마지막으로 배터리와 케이블을 결합시키지는 말아야 한다고 함
(실수로 연결해버림 ㅋㅋ)
opencr 보드를 연결시키고 2번째 판 결합사진처럼 배터리 케이블은 연결시키지 말아야했는데 전원케이블을 연결하자마자 켜진다
전원케이블을 미리 연결 시키지 말자. 메뉴얼에 잘 나와있음 ㅠ
라즈베리파이4B 결합하기 전에 usb케이블을 미리 끼워서 구멍으로 넣은 다음에 조립하자특히 아래쪽에 있는 기판은 usb2lds 인데 usb로 LDS와 연결이 되는데
기판이 고정된 상태에서 usb케이블을 연결하려고 하면 쉽지 않다
미리 케이블을 연결해줘야 작업이 편하다
이제 3번째 판의 구멍을 통과한 usb케이블을 opencr에 연결해준다케이블이 새거라 빡빡해서 적당히 구부려주면서 해주면 좋다
라즈베리피파이는 GPIO라는 핀들이 있는데 모터등을 제어할 수 있게 된다고 알고 있다(다목적 용도의 input/output): 디지털 신호를 입력/출력
LDS (Laser Distance Sensor) 2세대 모델로 업그레이드가 되었다고 한다~마지막 4번째 판에 LDS를 부착할 수 있게 준비를 해준다
적당히 위치를 잡은 다음에 나중에 드라이버로 고정시켜주면 된다
마지막으로 4번째 판을 결합하기전에 구멍으로 케이블을 통과시켜주고 결합을 해주자
로보티즈의 터블봇3 버거가 완성이 되었다~혹시라도 망가질까봐 조심조심 그리고 사진도 찍으면서 하다보니 꽤 오래걸렸다
2.5인치 외장 하드디스크와 크기 비교를 해보았다~버거가 꽤 귀엽구먼! ㅋㅋㅋ
다행히도 망가뜨리지 않고 조립은 잘 된 것 같다~ ㅋㅋㅋ