#3 Robotis로보티즈-turtlebot3 OpenCR 설정
By
qsp
, Created on 2nd Mar 2022
OpenCR firmware 업로드
push버튼 테스트하기
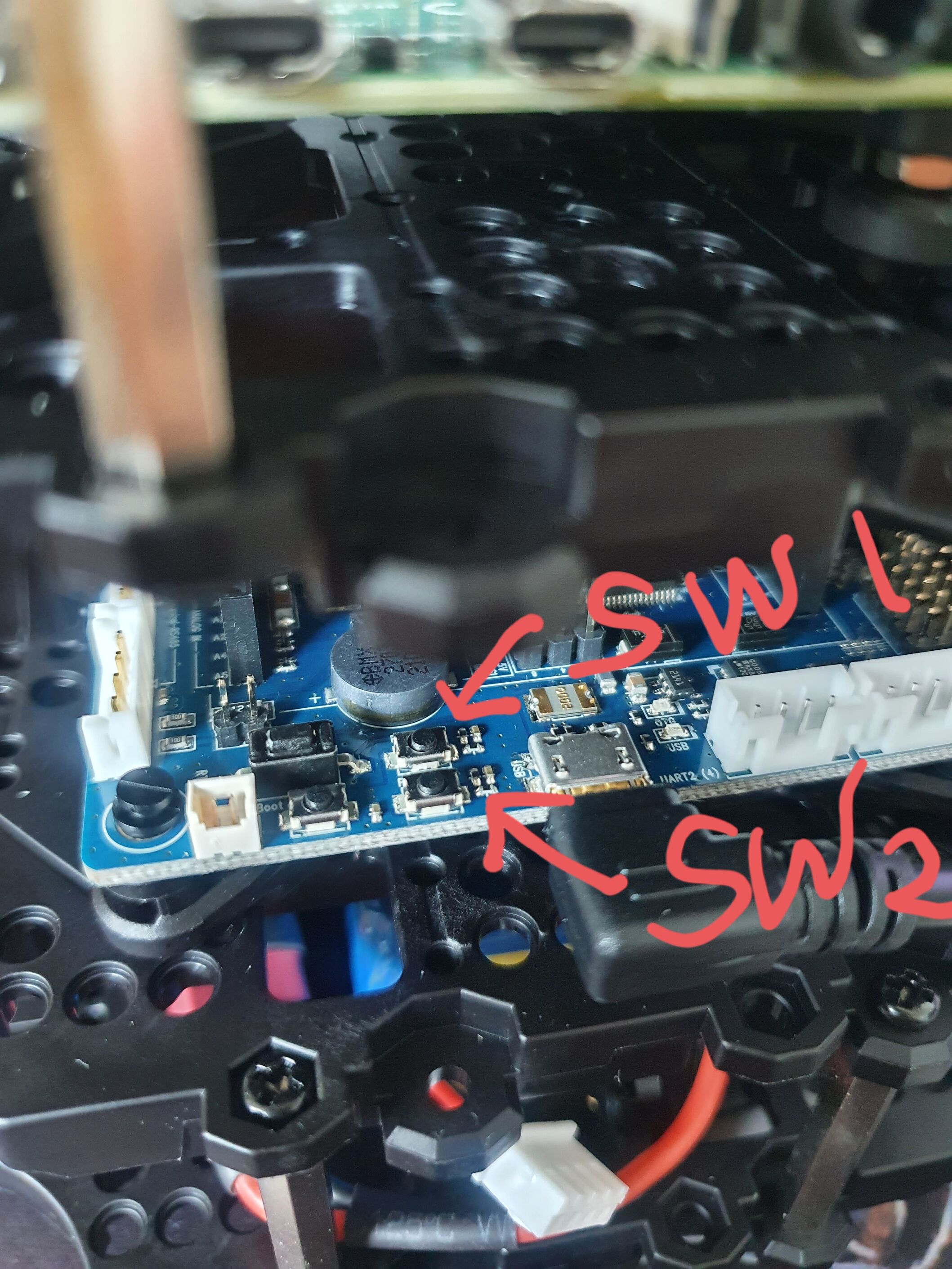 1번 버튼을 몇초 정도 누르면 30cm 정도 앞으로 이동한다
1번 버튼을 몇초 정도 누르면 30cm 정도 앞으로 이동한다
2번 버튼을 몇초 정도 누르면 한 바퀴 회전을 한다
라즈베리파이 SBC 셋팅이 끝나면 OpenCR 을 설정
OpenCR firmware 업로드
먼저
e-메뉴얼 opencr셋업 보러가기
정확한 메뉴얼을 참고하세요
라즈베리파 ubuntu에 로그인을 한 후에
$ sudo dpkg --add-architecture armhf
$ sudo apt update
$ sudo apt install libc6:armhfOPENCR_MODEL 이름을 정해준다. 현재 모델이 burger 이므로
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=burger
$ rm -rf ./opencr_update.tar.bz2펌웨어 다운로드 및 압축풀기
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS2/latest/opencr_update.tar.bz2
$ tar -xjf ./opencr_update.tar.bz2opencr_update.tar.bz2 이 압축이 푸리면 opencr_update라는 디렉토리가 생기는데
이동 후 업데이트 스크립트를 실행해준다
$ cd ~/opencr_update
$ ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencropencr의 정보가 나오고 완료된다
만약 펌웨어 업로드가 실패했다면 리커버리 모드에서 다시 진행할 수 있다고 한다
위의 e메뉴얼을 참고하자
push버튼 테스트하기
이제 opencr 보드에 있는 테스트 버튼을 눌러서 잘 작동하는지 확인해보자
눌렀을 때 아무런 반응이 없는 경우에는 껏다가 다시 켠 후에 시도
1번 버튼을 몇초 정도 누르면 30cm 정도 앞으로 이동한다2번 버튼을 몇초 정도 누르면 한 바퀴 회전을 한다